Tiêu chuẩn quốc gia TCVN 7973-4:2008 (ISO 13232-4 : 2005) về Mô tô - Quy trình thử và phân tích để nghiên cứu đánh giá các thiết bị lắp trên mô tô để bảo vệ người lái khi đâm xe - Phần 4: Biển số cần đo, thiết bị và quy trình đo
Tiêu chuẩn quốc gia TCVN 7973-4:2008 (ISO 13232-4 : 2005) về Mô tô - Quy trình thử và phân tích để nghiên cứu đánh giá các thiết bị lắp trên mô tô để bảo vệ người lái khi đâm xe - Phần 4: Biển số cần đo, thiết bị và quy trình đo
| Số hiệu: | TCVN7973-4:2008 | Loại văn bản: | Tiêu chuẩn Việt Nam |
| Nơi ban hành: | *** | Người ký: | *** |
| Ngày ban hành: | 01/01/2008 | Ngày hiệu lực: | Đã biết |
| Ngày công báo: | Đang cập nhật | Số công báo: | Đang cập nhật |
| Tình trạng: | Đã biết |
| Số hiệu: | TCVN7973-4:2008 |
| Loại văn bản: | Tiêu chuẩn Việt Nam |
| Nơi ban hành: | *** |
| Người ký: | *** |
| Ngày ban hành: | 01/01/2008 |
| Ngày hiệu lực: | Đã biết |
| Ngày công báo: | Đang cập nhật |
| Số công báo: | Đang cập nhật |
| Tình trạng: | Đã biết |
|
Mục tiêu |
Vị trí |
|
Đường tâm nắp capô |
100 mm phía sau gờ trước của nắp capô 100 mm phía trước gờ sau của nắp capô |
|
Đường tâm mui xe |
100 mm phía sau gờ trước của mui xe 100 mm phía trước gờ sau của mui xe |
|
Đường tâm nắp khoang sau xe |
100 mm phía sau gờ trước nắp khoang sau xe 100 mm phía gờ trước sau nắp khoang sau xe |
|
Chuẩn mặt bên thân xea |
Nhìn thấy được từ máy quay bên cạnh xe đối diện |
|
a Từ ít nhất 10 khung phân tích phim trước sự chạm nhau đầu tiên của môtô/xe đối diện cho đến khi có sự chạm nhau đầu tiên của môtô/xe đối diện. |
|
4.3.4. Mặt đất
Phải cố định ít nhất hai mục tiêu trên mặt đất và chúng phải nhìn thấy được từ mỗi máy quay trước và tại thời điểm chạm nhau đầu tiên của môtô/xe đối diện. Chúng phải cách nhau ít nhất 2 m. Vị trí theo phương Z của tâm các mục tiêu phải bằng nhau. Ít nhất một trong các toạ độ cố định trên mặt đất này phải nhìn thấy được và không bị làm nhiễu ở mỗi máy quay từ ít nhất 10 khung phân tích phim trước sự chạm nhau đầu tiên của môtô/xe đối diện cho đến khi có sự chạm nhau đầu tiên của môtô/xe đối diện. Có thể sử dụng nhiều mục tiêu để tăng khả năng ít nhất một mục tiêu nhìn thấy được và không bị làm nhiễu trong toàn bộ quá trình phân tích phim.
4.3.4.1. Quan sát mô tô từ bên cạnh và từ phía trên
Các mục tiêu đặt trên mặt đất có thể nhìn thấy được từ các máy quay bên cạnh mô tô và phía trên mô tô phải được đặt thẳng hàng sao cho một đường thẳng nối các mục tiêu phải song song với đường tâm hoặc hướng đi của mô tô trước khi va chạm.
4.3.4.2. Quan sát mô tô từ phía sau hoặc phía trước
Các mục tiêu đặt trên mặt đất có thể nhìn thấy được từ các máy quay phía sau hoặc phía trước mô tô phải được đặt thẳng hàng sao cho một đường thẳng nối các mục tiêu phải vuông góc với đường tâm của mô tô trước khi va chạm. Một mục tiêu thứ ba đặt trên mặt đất phải nhìn thấy được và được đặt thẳng hàng sao cho nỏ ở ít nhất 1m phía trên và dọc theo trục quán tính Z của một trong hai mục tiêu trên mặt đất kia.
4.3.4.3. Quan sát xe đối diện từ bên cạnh
Các mục tiêu đặt trên mặt đất có thể nhìn thấy được từ các máy quay bên cạnh xe đối diện phải được đặt thẳng hàng sao cho một đường thẳng nối chúng phải song song với đường tâm hoặc hướng đi của xe đối diện trước khi va chạm.
4.3.5. Người nộm
...
...
...
Mọi chi tiết xin liên hệ: ĐT: (028) 3930 3279 DĐ: 0906 22 99 66
Nếu phải sử dụng các dữ liệu thử nghiệm cho mục đích so sánh sự mô phỏng, theo 4.5.4 của ISO 13232-7, thì sau đó các vị trí của mục tiêu này cũng phải được số hoá theo phương pháp đã định trong 5.2.4.
4.4. Thông số kỹ thuật của các cảm biến
4.4.1. Cảm biến điện tử
4.4.1.1. Gia tốc kế ở phần đầu
Các gia tốc dài của phần đầu được liệt kê trong 4.1.1 phải được đo bằng cách sử dụng các gia tốc kế Endevco, model 7264 : 2000 2), được lắp đặt bằng cách sử dụng một khối gá gia tốc kế 3) như đã chỉ ra trong Hình 1a và 1b. Khối gá gia tốc kế này phải được gắn vào đầu Hybrid III bằng cách sử dụng một giá để lắp đặt (3) như đã chỉ ra trong Hình 2.
4.4.1.2. Cảm biến lực ở phần cổ trên
Các biến số của phần cổ trên được liệt kê trong 4.1.1 phải được đo bằng cách sử dụng một cảm biến lực Denton, model 1716 4).
Hình 1a - Vị trí và hướng lắp đặt khối gá chín gia tốc kế
...
...
...
Mọi chi tiết xin liên hệ: ĐT: (028) 3930 3279 DĐ: 0906 22 99 66
Hình 1b - Vị trí và hướng lắp đặt khối gá chín gia tốc kế
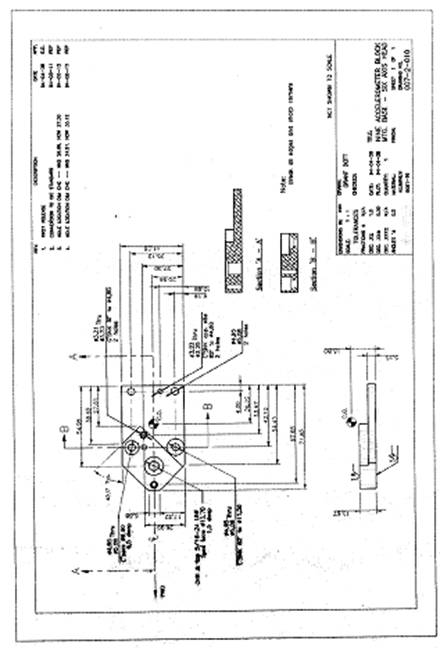
Hình 2 - Giá lắp đặt khối gá chín gia tốc kế
4.4.1.3. Chiết áp phần ngực
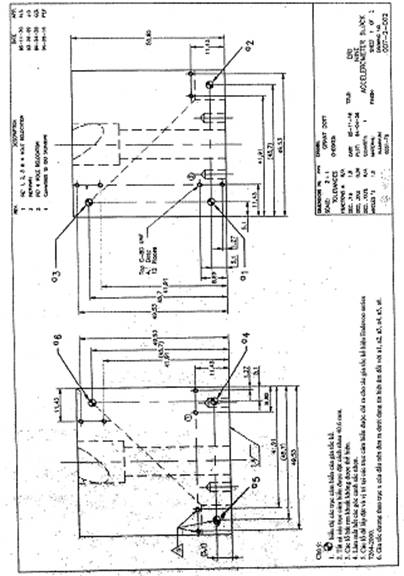
Các chuyển vị của phần ngực được liệt kê trong 4.1.1 phải được đo bằng cách sử dụng các chiết áp dây Space Age Control, model 160-321 VL và 160-321 VR 5), được lắp đặt như đã chỉ ra trong Hình 3 (6).
Có thể sử dụng các mô hình lắp đặt khác đối với các chiết áp phần ngực miễn là vị trí của các dây cáp như đã chỉ ra trong Hình 3 được giữ nguyên. Ví dụ, các chiết áp dây quấn phần dưới tay phải như đã chỉ ra trong Hình 3 có thể được thay bằng một chiết áp dây quấn phần tay trái lắp dưới vị trí dây cáp.
4.4.1.4. Cảm biến lực phần thắt lưng
Các lực và mômen tác dụng lên xương sống phần thắt lưng liệt kê trong 4.1.3 phải được đo bằng cách sử dụng cảm biến lực Denton, model 1798 (7) cho 6 trục hoặc model 1891 (7) cho ba trục.
4.4.1.5. Cảm biến lực phần xương đùi trên
...
...
...
Mọi chi tiết xin liên hệ: ĐT: (028) 3930 3279 DĐ: 0906 22 99 66
4.4.1.6. Tenxơmét phần xương chân dễ gãy
Các tenxơmét dùng để đo các lực và mômen tác dụng lên xương đùi trên, xương ống trên và dưới như đã liệt kê trong 4.1.1.2 và 4.1.3 phải phù hợp với các thông số kỹ thuật liệt kê trong Bảng 2. Chúng phải được lắp đặt trên các xương ở các vị trí chỉ ra trong Hình 4.
Bảng 2 - Thông số kỹ thuật của tenxơmét phần xương chân dễ gãy
Thông số
Đặc điểm kỹ thuật
Mô hình
Điện trở
Điện áp kích thích
Độ nhạy chéo trục cực đại
...
...
...
Mọi chi tiết xin liên hệ: ĐT: (028) 3930 3279 DĐ: 0906 22 99 66
Cầu hoặc bán cầu
350 Ω
2,05 V - 0,05 V đến 2,50 V + 0,05 V
5 %
2
Mỗi giá trị biến số phần xương chân dễ gãy được đo bằng tenxơmét trong mỗi thử nghiệm với tỷ lệ kích thước thực phải được hiệu chuẩn theo 5.2.2.
CHÚ THÍCH: Các tenxơmét phần xương dễ gãy được lắp đặt và hiệu chỉnh đúng có thể cung cấp thêm các thông tin hữu ích đối với thử nghiệm va chạm về độ lớn, phương chiều và thời điểm xuất hiện của các lực tác dụng lên xương trước khi hoặc khi không có các vết gãy xương. Tuy nhiên, vì các tenxơmét này bị đặt vào nơi dễ bị hư hại bởi nhiều tác nhân khác nhau, và vì những sự thay đổi về cách lắp đặt có thể xảy ra, nên trong mọi trường hợp chúng có thể không đáng tin cậy, đặc biệt là đối với khoảng thời gian trong và sau khi một xương bị gãy. Hơn nữa, giống như cảm biến lực, các tenxơmét chỉ cảm nhận lực tại một vị trí, trong khi các thành phần lực tại các vị trí khác của xương có thể lớn hơn rất nhiều. Vì những lý do này và một số lý do khác nữa, các tenxơmét được xem là không thích hợp cho việc đánh giá chấn thương hoặc sự phù hợp của các thử nghiệm sản xuất đối với xương dễ gãy.
Hình 3 - Lắp đặt các chiết áp phần ngực
...
...
...
Mọi chi tiết xin liên hệ: ĐT: (028) 3930 3279 DĐ: 0906 22 99 66
Hình 4 - Các vị trí tenxơmét phần xương chân dễ gẫy
4.4.1.7. Cảm biến liên tục phần xương dễ gãy
Cảm biến liên tục phần xương dễ gãy dùng để giám sát chỗ nứt gãy của phần xương dễ gãy phải được lắp đặt trên tất cả bốn chiếc xương như đã chỉ ra trên Hình 5 theo phương pháp được mô tả trong 5.4.
4.4.2. Cảm biến cơ khí
Tất cả các cảm biến cơ khí phải phù hợp với các thông số kỹ thuật đã cho trong ISO 13232-3. Các cảm biến phải bao gồm:
- một miếng đệm bọt ở phần bụng;
- các xương đùi và xương ống chân dễ gãy;
- các thành phần ở khớp gối;
- các chốt trượt ở khớp gối.
...
...
...
Mọi chi tiết xin liên hệ: ĐT: (028) 3930 3279 DĐ: 0906 22 99 66
Không được phép có dây cáp ngoài nào gắn với người nộm, trừ các dây cáp có thể tháo rời để cung cấp điện cho hệ thống thu nhận dữ liệu trong và cho cảm biến đụng chạm môtô/xe đối diện, trong pha trước va chạm. Yêu cầu lực tối đa để tháo rời các dây cáp là 5 N.
4.5.1. Dây cáp ngoài không nên dùng
Không nên sử dụng các dây cáp ngoài không thể tháo rời. Nếu sử dụng chúng, mỗi dây cáp phải có khối lượng không lớn hơn 1/3 kg và chiều dài không ngắn hơn 12 m. Khối lượng tổng cộng của tất cả các đoạn cáp nằm giữa người nộm và điểm gắn với mô tô không được vượt quá 4 kg. Các dây cáp phải được lắp ráp sao cho mỗi sợi không bị chùng. Trừ các điểm đầu cáp, các dây cáp không được gắn với mô tô, với người nộm hay với bất kỳ dây cáp nào khác. Các đầu dây cáp phải được gắn với người nộm bằng một dạng đầu nối gắn với phần sau của xương chậu.
4.5.2. Hệ thống thu nhận dữ liệu
Hệ thống thu nhận dữ liệu phải có khả năng ghi lại tối thiểu 32 kênh, tại dải băng tần tối thiểu là 2,5 kHz đối với hệ thống ghi tương tự (analog) hoặc tốc độ lấy mẫu là 10 kHz đối với hệ thống ghi số (digital). Phải áp dụng các thông số kỹ thuật của hệ thống như sau.
4.5.2.1. Điện áp kích thích của cảm biến
Các cảm biến lực và gia tốc kế phải có điện áp kích thích là 10,0 V ± 0,2 V. Các chiết áp và tenxơmét phải có điện áp kích thích từ 2,00 V - 0,05 V đến 2,50 V + 0,05 V.
4.5.2.2. Bộ lọc chống alias cho hệ thống số
Tất cả các kênh dữ liệu tương tự (analog) phải được lọc trước khi số hoá sao cho các dữ liệu bị suy giảm đi ít nhất 40 dB trên tần số là 7 kHz.
...
...
...
Mọi chi tiết xin liên hệ: ĐT: (028) 3930 3279 DĐ: 0906 22 99 66
Hình 5 - Mô hình đường dây đầu cuối của cảm biến liên tục phần xương dễ gẫy
4.5.2.3. Thông số kỹ thuật của bộ chuyển đổi từ tín hiệu tương tự sang tín hiệu số đối với hệ thống số
Thông số kỹ thuật của bộ chuyển đổi từ tín hiệu tương tự sang tín hiệu số phải theo Bảng 3.
Bảng 3 - Thông số kỹ thuật A đến D đối với hệ thống số
Thông số
Đặc tính
Số lượng kênh tối thiểu
Tốc độ lấy mẫu tối thiểu
Thời gian tối đa cho chuyển kênh
...
...
...
Mọi chi tiết xin liên hệ: ĐT: (028) 3930 3279 DĐ: 0906 22 99 66
Độ nhạy khuếch đại đối với nhiệt độ
32
10 000/s/kênh
12,5 x 10 -6 s
8
± 2 % trong khoảng từ 0 0C đến 70 0C
4.5.2.4. Khả năng lưu trữ
Thời gian ghi tối thiểu phải là 3,1 s.
4.5.2.5. Thông số kỹ thuật về mặt cơ khí của hệ thống thu nhận dữ liệu bên trong
...
...
...
Mọi chi tiết xin liên hệ: ĐT: (028) 3930 3279 DĐ: 0906 22 99 66
4.5.2.6. Xác định thang đo của các biến số
Đối với mỗi giá trị biến số ghi được, độ khuếch đại kênh của bộ ghi phải được điều chỉnh sao cho phạm vi ghi tối thiểu phải tương đương với các giá trị cho trong Bảng 4. Phạm vi ghi thực tế có thể vượt quá các giá trị trong Bảng 4 nếu độ phân giải thực của bộ ghi bao gồm cả tiếng ồn (nghĩa là 10 bit) sẽ dẫn đến một độ phân giải tín hiệu tương đương hoặc tốt hơn so với độ phân giải tín hiệu của bộ ghi 8 bit và các phạm vi ghi tối thiểu cho trong Bảng 4.
Bảng 4 - Các phạm vi ghi với tỷ lệ kích thước thực
Các vùng cơ thể
Biến đánh giá chấn thương
Phạm vi
Phần đầu
a1 , a4 , a7
a3 , a6
...
...
...
Mọi chi tiết xin liên hệ: ĐT: (028) 3930 3279 DĐ: 0906 22 99 66
a2 , a8
± 400 g
Phần cổ trên
Fx,n, Fy,n
Fz,n
Mx,n
My,n
Mz,n
± 15 kN
...
...
...
Mọi chi tiết xin liên hệ: ĐT: (028) 3930 3279 DĐ: 0906 22 99 66
± 700 Nm
± 1000 Nm
± 700 Nm
Phần ngực
LuL, luR
LlL, llR
± 60 mm
Xương sống phần thắt lưng
Fx,l, Fy,l
...
...
...
Mọi chi tiết xin liên hệ: ĐT: (028) 3930 3279 DĐ: 0906 22 99 66
Mx,l, My,l
Mz,l
± 5 kN
± 10 kN
± 500 Nm
± 250 Nm
Xương đùi trên
Fz,uF
Mx,uF, My,uF
...
...
...
Mọi chi tiết xin liên hệ: ĐT: (028) 3930 3279 DĐ: 0906 22 99 66
± 12 kN
± 600 Nm
± 400 Nm
Xương đùi dưới
Fz,lF
Mx,lF, My,lF
Mz,lF
± 12 kN
± 500 Nm
...
...
...
Mọi chi tiết xin liên hệ: ĐT: (028) 3930 3279 DĐ: 0906 22 99 66
Xương ống chân trên
Mx,uT, My,uT
Mz,uT
± 400 Nm
± 200 Nm
Xương ống chân dưới
Fz,lT
Mx,lT, My,lT
± 40 kN
...
...
...
Mọi chi tiết xin liên hệ: ĐT: (028) 3930 3279 DĐ: 0906 22 99 66
4.6. Chụp ảnh tốc độ cao
4.6.1. Thông số kỹ thuật của máy quay
Các máy quay, ống kính, vị trí máy quay, đường ngắm và điểm ngắm phải như nhau trong tất cả các thử nghiệm của một phép so sánh ghép cặp.
Các thông số sau phải được dẫn chứng bằng tài liệu đối với mỗi máy quay:
- vị trí của máy quay theo các phương x, y, z có liên quan đến điểm chạm của xe đối diện được xem là mục tiêu, như đã nêu ra trên Hình 1 của TCVN 7973-2, như được dự tính tại sự chạm nhau đầu tiên của môtô/xe đối diện, được chiếu xuống mặt đất và sử dụng các quy ước về trục đã định ra trong A.6.5.1 của ISO 13232-8;
- tiêu cự của các ống kính;
- tâm gần đúng của trường nhìn.
4.6.2. Máy quay được yêu cầu
Tất cả các máy quay dùng để phân tích quỹ đạo và vận tốc phải có một đèn định giờ bên trong có tần số tối thiểu là 100 Hz nhìn thấy được trong trường nhìn tại mọi thời điểm.
...
...
...
Mọi chi tiết xin liên hệ: ĐT: (028) 3930 3279 DĐ: 0906 22 99 66
Các máy quay yêu cầu và thông số kỹ thuật của chúng phải theo chỉ dẫn trong Bảng 5. Kích thước trường nhìn và tiêu cự tối thiểu nên dùng phải giống như đã định ra trong Bảng B.1 của Phụ lục B. Nếu sử dụng các máy quay tốc độ cao, nên dùng phim khổ 16 mm. Có thể sử dụng các khổ phim lớn hơn, trong trường hợp đó các giá trị tiêu cự tối thiểu liệt kê trong Bảng B.1 phải tăng theo tỉ lệ của khổ phim lớn hơn đó với 16 mm.
4.6.3. Máy quay nên dùng
Nên sử dụng các máy quay sau đây để cung cấp thêm các khả năng quan sát:
- máy quay mô tô theo hướng xiên (trường nhìn thích hợp);
- máy quay mô tô từ phía trước, nếu có thể áp dụng được (trường nhìn được cho trong Bảng 5);
- máy quay xe đối diện từ phía trước hoặc sau (bề rộng trường nhìn là 5 m);
- máy quay xe đối diện từ bên cạnh (bề rộng trường nhìn là 8 m);
- máy quay mô tô từ bên cạnh, nếu có sử dụng máy quay mô tô từ phía trước hoặc phía sau để phân tích chuyển động cho điều kiện va chạm 143 (trường nhìn thích hợp).
Trường nhìn của các máy quay này nên đảm bảo cho đầu người nộm có thể nhìn thấy được trong khung hình trong khoảng thời gian ít nhất từ 0,100 s trước đến 0,500 s sau sự chạm nhau đầu tiên của môtô/xe đối diện. Có thể sử dụng trường nhìn rộng hơn để đánh giá toàn bộ các thông số động lực học của chuỗi va chạm.
...
...
...
Mọi chi tiết xin liên hệ: ĐT: (028) 3930 3279 DĐ: 0906 22 99 66
Các bức ảnh hoặc các hình thức ghi ảnh độ phân giải cao khác dùng để Kiểm tra vị trí người nộm phải được chụp sau khi mô tô đã được đặt vào vị trí bắt đầu phóng của nó và trong khoảng 0,100 s trước sự chạm nhau đầu tiên của môtô/xe đối diện .
Nếu sử dụng máy quay chụp ảnh tĩnh, kích thước phim ít nhất phải là 35 mm. Tốc độ chỉnh đặt cửa chập (lá chắn sáng) phải là 1/500 s hoặc nhanh hơn. Các kích thước tiêu cự và trường nhìn cho phim khổ 35 mm phải như đã cho trong Bảng 6. Có thể sử dụng các khổ phim lớn hơn, trong trường hợp đó các giá trị tiêu cự tối thiểu liệt kê trong Bảng 6 phải được tăng lên theo tỉ lệ của khổ phim lớn hơn đó với 35 mm.
Bảng 5- Yêu cầu và thông số kỹ thuật của máy quay
Cảnh quay
Tốc độ khung hình, khung/s
Trường nhìn của máy
Đường ngắm
Đối tượng chụp tại lúc chạm nhau đầu tiên được mong đợi của môtô/xe đối diện
Mô tô từ phía trên
...
...
...
Mọi chi tiết xin liên hệ: ĐT: (028) 3930 3279 DĐ: 0906 22 99 66
Cho trong Phụ lục B
Vuông góc với mặt đất
Mũ bảo hiểm người nộm, điểm chạm nhau đầu tiên của môtô/xe đối diện, xe đối diện, mô tô và các mục tiêu trên mặt đất
Mô tô từ bên cạnh, phía sườn xe có tầm nhìn không bị trở ngại nhất đối với quỹ đạo của mũ bảo hiểm (trừ điều kiện va chạm 143)
00, tối thiểu
Cho trong Phụ lục B
Vuông góc với hướng chuyển động trước va chạm của môtô
Mũ bảo hiểm người nộm, điểm chạm nhau đầu tiên của môtô/xe đối diện, xe đối diện, mô tô và các mục tiêu trên mặt đất
Mô tô từ phía sau hoặc phía trước theo điều kiện va chạm 143
...
...
...
Mọi chi tiết xin liên hệ: ĐT: (028) 3930 3279 DĐ: 0906 22 99 66
Cho trong Phụ lục B
Vuông góc với hướng chuyển động trước va chạm của xe đối diện
Mũ bảo hiểm người nộm, điểm chạm nhau đầu tiên của môtô/xe đối diện, xe đối diện, mô tô và các mục tiêu trên mặt đất
Mô tô từ phía sau hoặc phía trước theo điều kiện va chạm 143
400, tối thiểu
Chiều thẳng đứng lớn hơn 30% ± 10% so với chiều cao tổng của mô tô/người nộm tại lúc chạm nhau đầu tiên được mong đợi của môtô/xe đối diện
Trong khoảng 50 theo hướng song song với hướng chuyển động trước va chạm của mô tô
Mô tô và các mục tiêu trên mặt đất, mũ bảo hiểm người nộm
Xe đối diện từ bên cạnh, nếu tốc độ xe đối diện được xác định bằng chụp ảnh
...
...
...
Mọi chi tiết xin liên hệ: ĐT: (028) 3930 3279 DĐ: 0906 22 99 66
Cho trong Phụ lục B
Vuông góc với hướng chuyển động trước va chạm của xe đối diện
Xe đối diện,và các mục tiêu trên mặt đất
Bảng 6 - Tiêu cự tối thiểu của máy chụp ảnh tĩnh và bề rộng trường nhìn
Cảnh
Tiêu cự tối thiểu
mm
Bề rộng trường nhìn
m
...
...
...
Mọi chi tiết xin liên hệ: ĐT: (028) 3930 3279 DĐ: 0906 22 99 66
100
4
phía trên
50
4
Các hệ thống chụp hình độ phân giải cao khác, ví dụ như các máy quay phim số tĩnh hoặc tốc độ cao, có thể được sử dụng nếu người sử dụng chứng minh được rằng độ phân giải, tốc độ màn chập và trường nhìn của hệ thống cho phép người sử dụng đo vị trí của các mục tiêu giữ nguyên kích thước với độ lệch chuẩn là 0,25 cm hoặc ít hơn (tức là độ sai lệch tổng cộng là 0,50 cm khi so sánh các bức ảnh trước thử nghiệm và trước va chạm với nhau). Đối với chuỗi thử nghiệm đã nêu, tài liệu làm bằng chứng cho sự chứng minh này phải được đính kèm với các báo cáo thử nghiệm đã nêu trong ISO 13232-8.
5.1. Phép đo trước thử nghiệm có liên quan đến sự rút gọn dữ liệu
Đối với mỗi mục tiêu trên mặt đất, đo các toạ độ theo phương x, y, z có liên quan đến các điểm chạm nhau đầu tiên của xe đối diện được xem là mục tiêu, như đã định ra trong Hình 1 của TCVN 7973-2, theo yêu cầu lúc chạm nhau đầu tiên của môtô/xe đối diện, được chiếu xuống mặt đất và sử dụng các quy ước về trục đã định ra trong A.6.5.1 của ISO 13232-8.
...
...
...
Mọi chi tiết xin liên hệ: ĐT: (028) 3930 3279 DĐ: 0906 22 99 66
- khoảng cách giữa các công tắc quang học hoặc điện tử - cơ khí;
- chiều rộng toàn bộ của xe đối diện.
Nếu tiêu cự của các ống kính máy quay tốc độ cao nhỏ hơn các giá trị được nêu trong Bảng B.1 thì ghi lại một mô hình lưới đối với mỗi máy quay tốc độ cao yêu cầu trước mỗi thử nghiệm va chạm trên cùng một phim như là một cảnh thử nghiệm va chạm, bằng cách sử dụng một lưới các mục tiêu đặt cách đều nhau trong trường nhìn của máy quay.
5.2. Rút gọn dữ liệu
5.2.1. Dữ liệu điện tử
Định nghĩa thời điểm khi chạm nhau đầu tiên của môtô/xe đối diện được cảm nhận bằng điện tử là mốc thời gian 0, t = 0,000 s. Định nghĩa mốc dữ liệu 0 là giá trị trung bình của 0,010 s dữ liệu đầu tiên, 0,050 s ban đầu trước mốc thời gian 0. Chuyển đổi các dữ liệu sang dạng dữ liệu theo tỉ lệ trong hệ đơn vị vật lý, sử dụng mốc dữ liệu 0 và giữ lại 3 chữ số có nghĩa. Lọc các dữ liệu sao cho toàn bộ đáp ứng tần số của dữ liệu đầu ra đối với tín hiệu tương tự (analog) chưa lọc đầu vào phải phù hợp với ISO 6487 và các mức đáp ứng tần số phải như đã cho trong Bảng 7.
Bảng 7 - Các mức đáp ứng tần số của người nộm trên mô tô trong thử nghiệm va chạm
Các phép đo thử nghiệm điển hình
Các mức đáp ứng tần số
...
...
...
Mọi chi tiết xin liên hệ: ĐT: (028) 3930 3279 DĐ: 0906 22 99 66
Phần cổ
Lực
Mômen
Phần ngực
Độ võng
Phần thắt lưng
Lực
Mômen
Xương đùi/xương ống chân
...
...
...
Mọi chi tiết xin liên hệ: ĐT: (028) 3930 3279 DĐ: 0906 22 99 66
Mômen
1000
1000
600
180
1000
...
...
...
Mọi chi tiết xin liên hệ: ĐT: (028) 3930 3279 DĐ: 0906 22 99 66
600
600
Tách các dữ liệu thành các cửa sổ được nhận biết với tư cách là các giai đoạn va chạm sơ cấp và thứ cấp.
Lưu trữ các dữ liệu trong các file điện tử tương thích với phiên bản mới nhất của ISO 13499.
Tính toán các giá trị gia tốc dài của phần đầu ax,H, ay,H, az,H và các giá trị gia tốc góc αx,H, αy,H, αz,H theo thời gian bằng cách sử dụng chương trình được bao gồm trong Phụ lục C.
Tính toán giá trị các mômen tác dụng lên u xương đầu xương chẩm phần cổ bằng cách sử dụng phương pháp được cho trong SAE J1733.
5.2.2. Hiệu chuẩn các tenxơmét phần xương chân dễ gãy
Hiệu chuẩn từng biến số được đo bằng tenxơmét phần xương chân dễ gãy bằng cách sử dụng phương pháp được mô tả dưới đây.
...
...
...
Mọi chi tiết xin liên hệ: ĐT: (028) 3930 3279 DĐ: 0906 22 99 66
Lần lượt đặt các tải trọng dưới đây lên xương, như minh họa trên các hình tương ứng:
- Fz = 3000 N, như minh họa trên Hình 6;
- Mx = 20 Nm, như minh họa trên Hình 7;
- My = 20 Nm, như minh họa trên Hình 8;
- Mz = 10 Nm, như minh họa trên Hình 8.
Hình 6 - Hiệu chuẩn tenxơmét đo Fz
Kích thước tính bằng milimét
...
...
...
Mọi chi tiết xin liên hệ: ĐT: (028) 3930 3279 DĐ: 0906 22 99 66
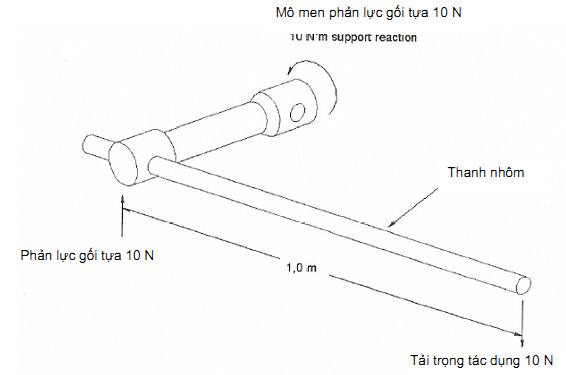
Hình 8 - Hiệu chuẩn tenxơmét đo Mz
5.2.2.2. Ghi lại dữ liệu
Đối với mỗi một trong bốn tải trong trên được áp dụng và mỗi kênh dữ liệu của tenxơmét định sử dụng trong suốt một thử nghiệm đâm xe, ghi lại các thông tin sau vào Bảng 8, 9 hoặc 10:
- điện áp kích thích;
- độ khuếch đại tín hiệu dùng cho phương pháp hiệu chỉnh (có thể sai khác so với độ khếch đại tín hiệu dùng trong suốt thử nghiệm va chạm với tỷ lệ kích thước thực);
- sự thay đổi điện áp tín hiệu đầu ra gây ra bởi việc áp dụng từng tải trọng tương ứng.
Chọn một giá trị độ khuếch đại tín hiệu sao cho tỉ số tín hiệu - độ ồn được tính toán như 5.2.2.3 là 250 hoặc lớn hơn. Ghi lại tất cả các tín hiệu ngoài trục cần ghi đối với mỗi giá trị tải trọng được áp dụng và mỗi kênh dữ liệu trong thử nghiệm với tỷ lệ kích thước thực. Nếu một kênh dữ liệu cụ thể không cần thiết phải ghi lại trong thử nghiệm với tỷ lệ kích thước thực, chọn “N.A” (không áp dụng) trong hàng tương ứng của Bảng 8, 9 hoặc 10.
5.2.2.3. Độ nhạy sơ cấp của cảm biến
...
...
...
Mọi chi tiết xin liên hệ: ĐT: (028) 3930 3279 DĐ: 0906 22 99 66
Độ nhạy sơ cấp = ∆E0 / Ee . L . Gain
trong đó:
độ nhạy sơ cấp tính theo số vôn trên mỗi niutơn trên mỗi vôn hoặc số vôn trên mỗi niutơn mét trên mỗi V;
∆E0 là độ biến đổi của điện áp tín hiệu đầu ra, tính theo V;
Ee là điện áp kích thích, tính theo V;
L là tải trọng được áp dụng, tính theo N hoặc Nm;
Gain là độ khuếch đại của bộ khuếch đại sử dụng trong suốt quá trình hiệu chuẩn.
S/N = ∆E0 / Accmtr
trong đó:
...
...
...
Mọi chi tiết xin liên hệ: ĐT: (028) 3930 3279 DĐ: 0906 22 99 66
∆E0 là độ biến đổi điện áp tín hiệu đầu ra, tính bằng V;
Accmtr là độ chính xác của máy đo.
Bảng 8 - Dữ liệu hiệu chuẩn cho tenxơmét xương đùi
Nhận dạng xương________________________
Điện áp kích thích________________________
Kênh dữ liệu
Độ thu tín hiệu
Thay đổi điện áp tín hiệu đầu ra theo tải trọng tác dụng
Độ nhạy sơ cấp
...
...
...
Mọi chi tiết xin liên hệ: ĐT: (028) 3930 3279 DĐ: 0906 22 99 66
Mx tại 20 Nm
My tại 20 Nm
Mz tại 10 Nm
Fz xương đùi
...
...
...
Mọi chi tiết xin liên hệ: ĐT: (028) 3930 3279 DĐ: 0906 22 99 66
Mx xương đùi
B
My xương đùi
...
...
...
Mọi chi tiết xin liên hệ: ĐT: (028) 3930 3279 DĐ: 0906 22 99 66
B
Mz xương đùi
...
...
...
Mọi chi tiết xin liên hệ: ĐT: (028) 3930 3279 DĐ: 0906 22 99 66
B
Chỉ rõ thay đổi điện áp sơ cấp, được dùng để tính toán độ nhạy sơ cấp.
a Biểu thị bằng giá trị vôn đầu ra trên mỗi niutơn trên mỗi vôn điện áp kích thích.
b Biểu thị bằng giá trị vôn đầu ra trên mỗi niutơn mét trên mỗi vôn điện áp kích thích.
Bảng 9 - Dữ liệu hiệu chuẩn cho tenxơmét xương ống trên
Nhận dạng xương________________________
Điện áp kích thích________________________
Kênh dữ liệu
...
...
...
Mọi chi tiết xin liên hệ: ĐT: (028) 3930 3279 DĐ: 0906 22 99 66
Thay đổi điện áp tín hiệu đầu ra theo tải trọng tác dụng
Độ nhạy sơ cấp
Fz tại 3 000 N
Mx tại 20 Nm
My tại 20 Nm
Mz tại 10 Nm
Mx xương ống trên
...
...
...
Mọi chi tiết xin liên hệ: ĐT: (028) 3930 3279 DĐ: 0906 22 99 66
a
My xương ống trên
...
...
...
Mọi chi tiết xin liên hệ: ĐT: (028) 3930 3279 DĐ: 0906 22 99 66
Mz xương ống trên
a
Chỉ rõ thay đổi điện áp sơ cấp, dùng để tính toán độ nhạy sơ cấp.
...
...
...
Mọi chi tiết xin liên hệ: ĐT: (028) 3930 3279 DĐ: 0906 22 99 66
Bảng 10 - Dữ liệu hiệu chuẩn cho tenxơmét xương ống dưới
Nhận dạng xương________________________
Điện áp kích thích________________________
Kênh dữ liệu
Độ thu tín hiệu
Thay đổi điện áp tín hiệu đầu ra theo tải trọng tác dụng
Độ nhạy sơ cấp
Fz tại 3 000 N
Mx tại 20 Nm
...
...
...
Mọi chi tiết xin liên hệ: ĐT: (028) 3930 3279 DĐ: 0906 22 99 66
Mz tại 10 Nm
Fz xương ống dưới
A
Mx xương ống dưới
...
...
...
Mọi chi tiết xin liên hệ: ĐT: (028) 3930 3279 DĐ: 0906 22 99 66
B
My xương ống dưới
...
...
...
Mọi chi tiết xin liên hệ: ĐT: (028) 3930 3279 DĐ: 0906 22 99 66
B
Chỉ rõ thay đổi điện áp sơ cấp, được dùng để tính toán độ nhạy sơ cấp.
a Biểu thị bằng giá trị vôn đầu ra trên mỗi niutơn trên mỗi vôn điện áp kích thích.
b Biểu thị bằng giá trị vôn đầu ra trên mỗi niutơn mét trên mỗi vôn điện áp kích thích.
Nếu bất cứ giá trị điện áp tín hiệu đầu ra ngoài trục nào cho một kênh như đã liệt kê trong Bảng 8, 9 hoặc 10 vượt quá 15 % so với sự thay đổi điện áp sơ cấp cho kênh đó thì không được sử dụng kênh dữ liệu tenxơmét đó trong thử nghiệm va chạm với tỷ lệ kích thước thực.
Nếu các tenxơmét được sử dụng trong các thử nghiệm va chạm với tỷ lệ kích thước thực thì bao gồm các Bảng 8, 9 và 10, khi thích hợp, trong ISO 13232-8.
5.2.3. Dữ liệu các thành phần dễ gãy
...
...
...
Mọi chi tiết xin liên hệ: ĐT: (028) 3930 3279 DĐ: 0906 22 99 66
Tháo rời người nộm ra. Kiểm tra các thành phần dễ gãy. Chụp ảnh chúng trên một nền tương phản, theo một tỉ lệ có thể chỉ ra một cách rõ ràng các vết nứt hoặc biến dạng, và để số thử nghiệm hiện ra rõ ràng. Nếu bất cứ giá trị điện áp tín hiệu đầu ra ngoài trục nào cho một kênh như đã liệt kê trong Bảng 8, 9 hoặc 10 vượt quá 15 % so với sự thay đổi điện áp sơ cấp cho kênh đó thì không được sử dụng kênh dữ liệu tenxơmét đó trong thử nghiệm va chạm với tỷ lệ kích thước thực.
Nếu các tenxơmét được sử dụng trong các thử nghiệm va chạm với tỷ lệ kích thước thực thì bao gồm các Bảng 8, 9 và 10, khi thích hợp, trong ISO 13232-8.
5.2.3.1. Xương đùi và xương ống chân
Xác định mức độ khốc liệt của thương tổn đối với các xương chân dễ gãy. Một xương chân được xem là bị gãy nếu các đầu xương có thể bị quay tương đối so với đầu kia bằng tay. Nếu không, nó được xem là chưa gãy. Đối với một xương gãy, nếu các mảnh xương được đặt tại vị trí tương đối ban đầu khi chưa bị gãy của chúng, và nếu các vùng gãy dài hơn 20 mm trong phạm vi trục, thì vết gãy được xem là vết gãy bị dịch chuyển. Nếu không, vết gãy được xem là vết gãy không bị dịch chuyển.
5.2.3.2. Xoắn xương đầu gối và các chốt trượt
Xác định mức độ khốc liệt của thương tổn đối với mỗi khớp đầu gối dễ gãy. Đối với mỗi xương đầu gối dễ gãy, nếu một chốt trượt bị gãy thành hai mảnh riêng biệt hoặc nhiều hơn thì xương đầu gối được xem là bị trật khớp một phần. Đối với mỗi xương đầu gối dễ gãy, nếu hai chốt trượt bị gãy thành hai mảnh riêng biệt hoặc nhiều hơn thì khớp đầu gối được xem là bị trật khớp hoàn toàn. Nếu không, xương đầu gối được xem là không bị trật khớp.
5.2.3.3. Miếng đệm phần bụng
Đo chiều sâu biến dạng dư lớn nhất của vật liệu miếng đệm phần bụng theo phương của vết dập nát phần bụng, tương đối so với bề mặt không bị biến dạng. Giá trị này được xem là độ đâm xuyên dư lớn nhất ở phần bụng, pA,max.
5.2.4. Dữ liệu ảnh chụp tốc độ cao từ các máy quay yêu cầu
...
...
...
Mọi chi tiết xin liên hệ: ĐT: (028) 3930 3279 DĐ: 0906 22 99 66
Xác lập sự chạm nhau đầu tiên nhìn thấy được của môtô/xe đối diện hoặc khung hình cuối cùng trước sự phát sáng của đèn cảm biến va chạm, tuỳ sự kiện nào xuất hiện trước. Phân tích dữ liệu tại các khoảng giữa khung hình cho trong Bảng B.1. Sử dụng các đèn định giờ của máy quay, tính toán khoảng thời gian được kết hợp với mỗi khung phim được phân tích, từ 10 khung phân tích phim trước sự chạm nhau đầu tiên của môtô/xe đối diện đến 10 khung phân tích phim sau sự chạm nhau đầu tiên của mũ bảo hiểm/xe đối diện hoặc đến 80 khung phân tích phim sau chạm nhau đầu tiên của môtô/xe đối diện hoặc cho đến khi điểm tâm của mũ bảo hiểm ra khỏi trường nhìn, tuỳ thời điểm nào sớm hơn.
5.2.4.2. Phép phân tích quỹ đạo của mũ bảo hiểm
Sử dụng các phương pháp mô tả trong Phụ lục A, số hoá vị trí điểm tâm của mũ bảo hiểm đối với mỗi khung phim thứ N. Tính toán giá trị N bằng cách sử dụng công thức dưới đây, sau đó làm tròn đến giá trị nguyên gần nhất.
trong đó:
N là khung phim;
Wf là bề rộng khung hình, tính theo m;
rf là tốc độ hình, tính theo số hình/s;
Vx,MC,p là vận tốc trước va chạm của mô tô (hoặc của xe đối diện đối với các thử nghiệm mà mô tô đứng yên), tính theo m/s;
...
...
...
Mọi chi tiết xin liên hệ: ĐT: (028) 3930 3279 DĐ: 0906 22 99 66
Ví dụ về các khoảng thời gian phân tích phim được cho trong Bảng B.1.
Số hoá điểm tâm của mũ bảo hiểm cho khung thời gian như được định ra trong 5.2.4.1 bằng cách sử dụng phương pháp sau đây:
5.2.4.2.1. Đặt xh = yh = 0 tại lúc chạm nhau đầu tiên của môtô/xe đối diện, và zh là tọa độ của điểm tâm của mũ bảo hiểm so với mặt đất tại lúc chạm nhau đầu tiên của môtô/xe đối diện, với zg = 0.
5.2.4.2.2. Số hoá và tính toán giá trị của mỗi vị trí điểm tâm của mũ bảo hiểm đối với một mục tiêu cố định trên mặt đất, nhằm mục đích loại trừ tác động của các sự thay đổi khung hình máy quay. Đối với tất cả các loại hình va chạm, trừ điều kiên va chạm 143, số hoá toạ độ yh bằng cách sử dụng máy quay mô tô từ phía trên, và số hoá các toạ độ xh, zh bằng cách sử dụng máy quay mô tô từ bên cạnh. Đối với điều kiện va chạm 143, số hoá toạ độ xh bằng cách sử dụng máy quay mô tô từ phía trên, và số hoá các toạ độ yh, zh bằng cách sử dụng máy quay mô tô từ phía trước hoặc phía sau.
CHÚ THÍCH: Phương pháp phân tích quỹ đạo của mũ bảo hiểm này hiện tại không có ý nghĩa lắm đối với loại hình va chạm 143.
5.2.4.2.3. Tính toán xh , yh và zh bằng cách sử dụng một hệ số hiệu chuẩn chiều sâu. Ví dụ, đối với xh:
trong đó:
xh là chiều sâu của toạ độ quán tính x được hiệu chỉnh của điểm tâm của mũ bảo hiểm;
...
...
...
Mọi chi tiết xin liên hệ: ĐT: (028) 3930 3279 DĐ: 0906 22 99 66
dc,h là khoảng cách vuông góc giữa máy quay và điểm tâm của mũ bảo hiểm, như được tính toán từ các phép đo nêu trong 4.6.1 và hình vẽ cách bố trí thử nghiệm được phác hoạ trong A.6.5.2 của ISO 13232-8, tính theo mét;
dc,g là khoảng cách vuông góc giữa máy quay và các mục tiêu cố định trên mặt đất mô tả trong 4.3.4, như được tính toán từ các phép đo định ra trong 4.6.2 và hình vẽ cách bố trí thử nghiệm được phác hoạ trong A.6.5.2 của ISO 13232-8, tính theo mét;
5.2.4.2.4. Tính toán khoảng thời gian được kết hợp với mỗi khung phân tích bằng cách sử dụng các đèn định giờ của máy quay theo 5.2.4.1.
5.2.4.2.5. Nếu tiêu cự của các ống kính nhỏ hơn các giá trị nêu trong Bảng B.1 thì hiệu chỉnh các vị trí cho độ méo của ống kính bằng cách sử dụng một lưới các mục tiêu, như đã nêu trong 5.1.
5.2.4.2.6. Làm phẳng các toạ độ bằng cách sử dụng bốn dải của một bộ lọc chuyển động trung bình:
trong đó:
xh,I là tọa độ điểm tâm của mũ bảo hiểm cho khung phân tích i, tính theo mét.
5.3. Điều kiện của va chạm
...
...
...
Mọi chi tiết xin liên hệ: ĐT: (028) 3930 3279 DĐ: 0906 22 99 66
Xác định quãng đường đi được của xe và khoảng thời gian để đi quãng đường đó để tính toán tốc độ của xe bằng cách sử dụng phương pháp phân tích phim hoặc phương pháp điện tử mô tả dưới đây.
5.3.1.1. Phương pháp phân tích phim
Sử dụng các máy quay tốc độ cao cho mô tô và xe đối diện với tầm quan sát hẹp.
5.3.1.1.1. Quãng đường đi được
Trên bề mặt số hoá phim, vẽ khoảng cách giữa hai mục tiêu trên mặt đất theo một tỉ lệ dựa trên cơ sở khoảng cách thực tế đo được trước đó, như được đo trong 5.1. Dùng tỉ lệ này, xác định vị trí của mục tiêu xe đối với một mục tiêu trên mặt đất đơn lẻ trong các khung phim tính đến thời điểm, nhưng không bao gồm sự chạm nhau đầu tiên của môtô/xe đối diện. Tính toán quãng đường đi được thực tế của mục tiêu xe bằng cách sử dụng một hệ số hiệu chỉnh chiều sâu, theo 5.2.4.2.3, sao cho quãng đường đi được tối thiểu của mục tiêu xe trong suốt khoảng thời gian phép đo vượt quá 1,0 m.
5.3.1.1.2. Thời gian trôi qua
Tính toán thời gian trôi qua đối với phép đo bằng cách sử dụng việc đếm khung phim tại tốc độ 1000 khung/s. Nhân giá trị thời gian trôi qua với hệ số hiệu chỉnh thời gian khung, xác định bởi đèn định giờ của máy quay.
5.3.1.2. Phương pháp điện tử
5.3.1.2.1. Quãng đường đi được
...
...
...
Mọi chi tiết xin liên hệ: ĐT: (028) 3930 3279 DĐ: 0906 22 99 66
5.3.1.2.2. Thời gian trôi qua
Tính toán thời gian trôi qua, độ chênh lệch trong các thời gian xung, được đo bằng thiết bị ghi điện tử.
5.3.2. Góc hướng chuyển động tương đối tại lúc va chạm
Sử dụng phim từ máy quay tốc độ cao có tầm nhìn hẹp trên đầu. Phân tích khung phim ngay trước sự chạm nhau đầu tiên của môtô/xe đối diện. Kẻ một đường thẳng nối các mục tiêu trên đường tâm trước và sau mô tô, và kẻ một đường thẳng khác nối hai mục tiêu bất kỳ trong số các mục tiêu trên đường tâm nắp capô hoặc nắp khoang hành lý sau của xe đối diện, hoặc thay thế bằng một đường thẳng nối hai mục tiêu trên đường tâm mui xe. Đo góc thuận chiều kim đồng hồ từ đường tâm mô tô đến đường tâm xe đối diện.
5.3.3. Góc lắc ngang của mô tô khi va chạm
Sử dụng các mục tiêu tham chiếu thẳng đứng trên mặt đất và phim của máy quay mô tô từ phía trước hoặc phía sau. Phân tích khung phim ngay trước sự chạm nhau đầu tiên của môtô/xe đối diện. Sử dụng đường tâm lốp trước hoặc lốp sau, hoặc một đường thẳng nối các mục tiêu trên đường tâm phía trên và phía dưới mô tô, đo góc giữa mục tiêu tham chiếu thẳng đứng trên mặt đất và đường tâm tham chiếu thẳng đứng của mô tô.
5.3.4. Điểm chạm nhau của xe đối diện
Sử dụng phim từ máy quay tốc độ cao có tầm nhìn hẹp trên đầu. Phân tích khung phim ngay trước sự chạm nhau đầu tiên của môtô/xe đối diện.
Nếu điểm chạm nhau của xe đối diện nằm ở mặt trước, góc trước, mặt sau hoặc góc sau, và điểm chạm nhau của mô tô nằm ở phía trước hoặc phía sau, thì toạ độ theo phương ngang của điểm chạm nhau của xe đối diện (ycp) được xem là khoảng cách, tính theo m, giữa đường tâm mô tô và xe đối diện, được đo vuông góc với đường tâm xe đối diện, tại gờ trước xe đối diện. Xem hình minh hoạ 9a.
...
...
...
Mọi chi tiết xin liên hệ: ĐT: (028) 3930 3279 DĐ: 0906 22 99 66
xcp = [(WOV / 2).tan(90-rha)] + a
trong đó:
xcp là toạ độ theo phương dọc của điểm chạm nhau của xe đối diện, tính theo mét;
WOV là chiều rộng toàn bộ của xe đối diện, tính theo mét;
rha là góc hướng chuyển động tương đối, tính theo độ;
a là khoảng cách giữa gờ trước xe đối diện và giao điểm của đường tâm mô tô và xe đối diện, tính theo mét;
Nếu điểm chạm nhau của xe đối diện nằm ở phía trước hoặc phía sau và điểm chạm nhau của mô tô nằm ở bên cạnh thì ycp là khoảng cách, tính theo m, giữa đường tâm xe đối diện và trung điểm của chiều dài toàn bộ của mô tô. Xem Hình 9c.
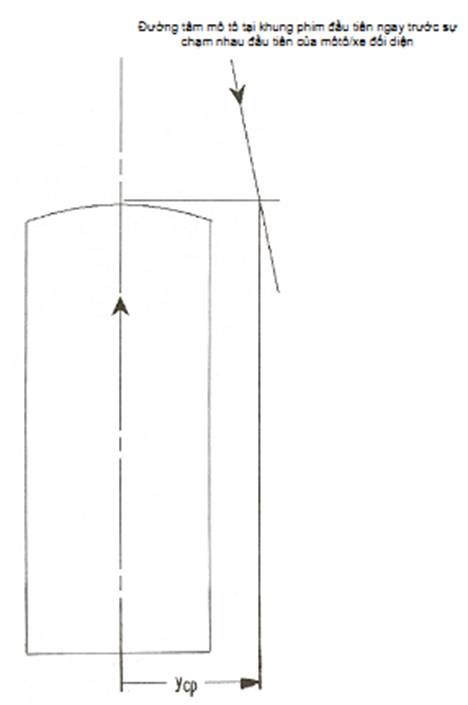
Hình 9a - Xác định điểm chạm nhau của xe đối diện đối với sự chạm mặt trước, góc trước, mặt sau hoặc góc sau của xe đối diện với phía trước hoặc phía sau mô tô (va chạm xiên)
...
...
...
Mọi chi tiết xin liên hệ: ĐT: (028) 3930 3279 DĐ: 0906 22 99 66
Hình 9b - Xác định điểm chạm nhau của xe đối diện đối với sự chạm bên cạnh của xe
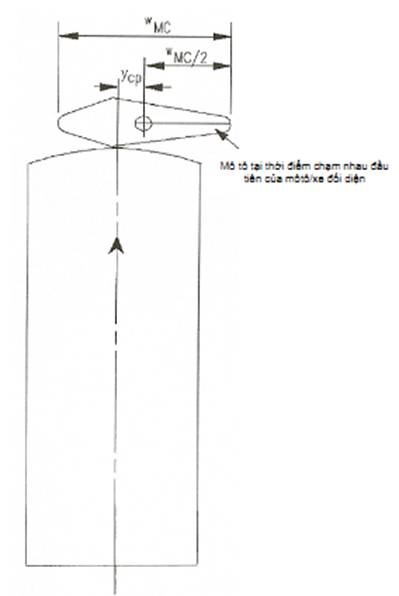
Hình 9c - Xác định điểm chạm nhau của xe đối diện, mặt trước hoặc sau của xe đối diện đụng chạm với bên cạnh mô tô (ycp là dương)
5.3.5. Kiểm tra vị trí người nộm
Sử dụng các bức ảnh trước thử nghiệm và trước va chạm chụp từ phía trên và bên cạnh.
Từ các bức ảnh bên cạnh, ghi lại các toạ độ tương đối x và z của điểm tâm của mũ bảo hiểm người nộm và các điểm vai, hông, đầu gối, mắt cá chân so với các điểm mục tiêu của mô tô. Từ các bức ảnh phía trên, ghi lại các toạ độ tương đối x và y của điểm tâm của mũ bảo hiểm người nộm so với các điểm mục tiêu của mô tô. Nếu một phần của mô tô hoặc các đối tượng khác che khuất một hoặc một vài điểm này thì ghi lại toạ độ của các điểm còn lại.
5.4. Cảm biến liên tục phần xương dễ gãy
5.4.1. Lắp đặt dây
Nối một sợi dây điện từ liền có đường kính 0,17 mm ± 0,02 mm với phần xương dễ gãy bằng một chất keo dính pha xianôacrylat. Sử dụng mô hình đường dây đầu - cuối, như đã chỉ ra trong Hình 5, dẫn đến ít nhất bốn phần dây chạy dọc theo chiều dài xương đặt không quá 90 0 so với nhau. Có thể sử dụng một hợp chất xúc tác để làm khô nhanh keo dính.
...
...
...
Mọi chi tiết xin liên hệ: ĐT: (028) 3930 3279 DĐ: 0906 22 99 66
Kiểm tra để đảm bảo sợi dây đường kính 0,17 mm không bị đứt trong suốt quá trình lắp ráp.
5.4.2. Bộ phận cảm biến
Lắp một cảm biến như chỉ dẫn trong Hình 10. Cấu hình phần có thể dùng lại được của cảm biến để tương thích với hệ thống thu nhận dữ liệu và các khớp nối xương nhỏ, như mô tả ở trên.
Kiểm tra chức năng của cảm biến bằng cách nối và tháo các khớp nối xương khác nhau trong khi giám sát tín hiệu đầu ra. Cung cấp tài liệu về mối quan hệ giữa các dây bị đứt và tín hiệu tạo ra cho phép phân tích dữ liệu hậu thử nghiệm.
Tất cả các thông số kỹ thuật, sự hiệu chuẩn và dữ liệu thử nghiệm được mô tả ở trên phải được cung cấp bằng tài liệu theo đúng ISO 13232-8.
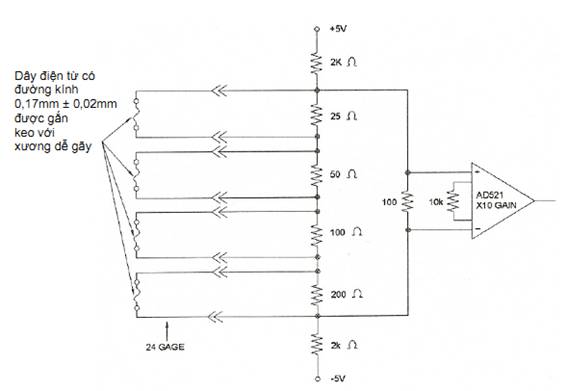
Hình 10 - Sơ đồ mạch cảm biến liên tục phần xương dễ gãy
...
...
...
Mọi chi tiết xin liên hệ: ĐT: (028) 3930 3279 DĐ: 0906 22 99 66
Số hoá điểm tâm của mũ bảo hiểm
A.1. Nguyên tắc
Nhận dạng và số hoá điểm tâm của mũ bảo hiểm bằng cách sử dụng các máy quay mô tô từ phía trên và bên cạnh.
A.2. Thiết bị
Máy phân tích chuyển động phim, như đã nêu trong 4.3.
A.3. Quy trình
A.3.1. Lắp phim vào máy phân tích phim.
A.3.2. Chỉnh phim vào khung hình khi xảy ra sự chạm nhau đầu tiên của môtô/xe đối diện
...
...
...
Mọi chi tiết xin liên hệ: ĐT: (028) 3930 3279 DĐ: 0906 22 99 66
A.3.4. Vẽ một đường tròn ngoại tiếp với mũ bảo hiểm nhìn thấy trên bề mặt số hoá.
A.3.5. Đánh dấu điểm tâm của đường tròn. Đó là trọng tâm của mũ bảo hiểm.
A.3.6. Đối với mỗi khung phân tích, định tâm đường tròn bên ngoài hoặc bên trong mũ bảo hiểm bằng cách dịch chuyển tấm phim trong suốt xung quanh bề mặt số hoá, sử dụng phần đường biên nhìn thấy được của mũ bảo hiểm.
A.3.7. Số hoá vị trí của tâm đường tròn.
Yêu cầu đối với trường nhìn máy chụp ảnh tốc độ cao
B.1. Bảy kiểu va chạm đối với hướng nhìn mô tô từ phía trên và từ bên cạnh
...
...
...
Mọi chi tiết xin liên hệ: ĐT: (028) 3930 3279 DĐ: 0906 22 99 66
B.2. Các kiểu va chạm khác và các hướng nhìn khác của máy quay
Chọn máy quay, ống kính và vị trí máy quay sao cho bề rộng khung hình bằng:
Wf = Vx,h,p x 0,600 s
trong đó:
Wf là bề rộng khung hình, tính theo mét;
Vx,h,p là vận tốc điểm tâm của mũ bảo hiểm trước va chạm ứng với các máy quay mô tô từ phía trên và bên cạnh, tính theo mét trên giây;
0,600 s là khoảng thời gian mà điểm tâm của mũ bảo hiểm nên ở trong trường nhìn
Vận tốc xe đối diện trước va chạm được dùng để xác định bề rộng khung hình ứng với các máy quay xe đối diện từ bên cạnh hoặc phía trên.
Có thể sử dụng các cảnh hẹp hơn miễn là mũ bảo hiểm phải nhìn thấy được tại lúc chạm nhau đầu tiên của mũ bảo hiểm/xe đối diện. Chọn điểm ngắm sao cho mũ bảo hiểm phải được nhìn thấy ít nhất 0,100 s trước sự chạm nhau đầu tiên của môtô/xe đối diện. Định hướng khung hình máy quay sao cho bề rộng khung hình được sắp song song với hướng chuyển động trước va chạm của mũ bảo hiểm. Ghi lại các giá trị tiêu cự ống kính máy quay và các toạ độ x, y, z đối với điểm chạm nhau mong đợi đầu tiên giữa môtô/xe đối diện và đói với mặt đất. Giá trị phim phân tích phải như mô tả trong 5.2.4.1.
...
...
...
Mọi chi tiết xin liên hệ: ĐT: (028) 3930 3279 DĐ: 0906 22 99 66
Kiểu va chạm
m/s
Máy quay
Trường nhìn nên dùng của máy quay
Tiêu cự tối thiểu
mm
Số lượng khung phân tích phim
xem CHÚ THÍCH
Rộng (m)
...
...
...
Mọi chi tiết xin liên hệ: ĐT: (028) 3930 3279 DĐ: 0906 22 99 66
![]()
Bên cạnh
8,0
5,7
25
10
Phía trên
8,0
5,7
...
...
...
Mọi chi tiết xin liên hệ: ĐT: (028) 3930 3279 DĐ: 0906 22 99 66
10

Bên cạnh
8,0
5,7
25
8
Phía trên
8,0
...
...
...
Mọi chi tiết xin liên hệ: ĐT: (028) 3930 3279 DĐ: 0906 22 99 66
13
8

Bên cạnh
9,8
5,7
25
8
Phía trên
...
...
...
Mọi chi tiết xin liên hệ: ĐT: (028) 3930 3279 DĐ: 0906 22 99 66
5,7
13
8

Bên cạnh
8,0
5,7
25
8
...
...
...
Mọi chi tiết xin liên hệ: ĐT: (028) 3930 3279 DĐ: 0906 22 99 66
8,0
5,7
13
8

Bên cạnh
8,0
5,7
25
...
...
...
Mọi chi tiết xin liên hệ: ĐT: (028) 3930 3279 DĐ: 0906 22 99 66
Phía trên
8,0
5,7
13
8

Bên cạnh
8,0
5,7
...
...
...
Mọi chi tiết xin liên hệ: ĐT: (028) 3930 3279 DĐ: 0906 22 99 66
8
Phía trên
8,0
5,7
13
8

Bên cạnh
8,0
...
...
...
Mọi chi tiết xin liên hệ: ĐT: (028) 3930 3279 DĐ: 0906 22 99 66
25
8
Phía trên
8,0
5,7
13
8
CHÚ THÍCH: Nếu tốc độ khung hình của máy quay không phải 1000 khung/s thì nhân giá trị khoảng thời gian phân tích phim đã cho với tỉ số tốc độ khung hình đó và 1000.
...
...
...
Mọi chi tiết xin liên hệ: ĐT: (028) 3930 3279 DĐ: 0906 22 99 66
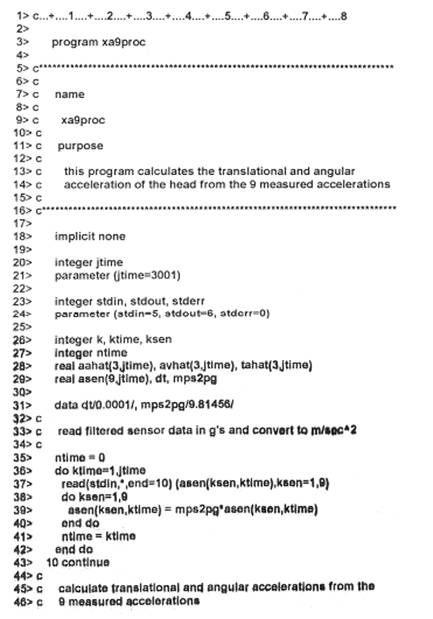
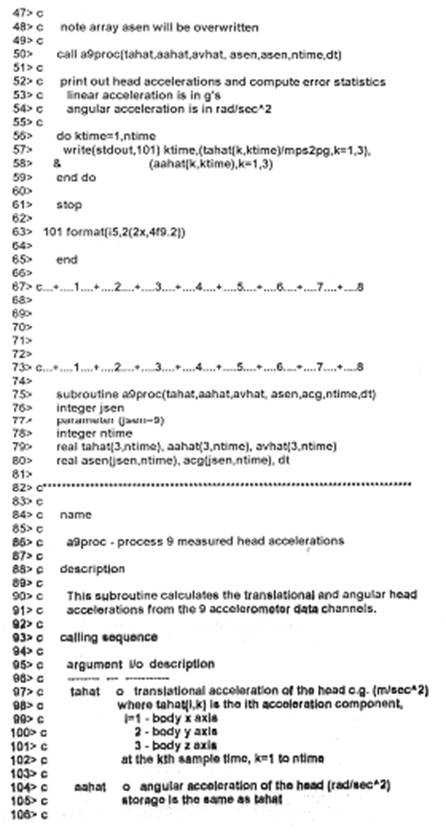
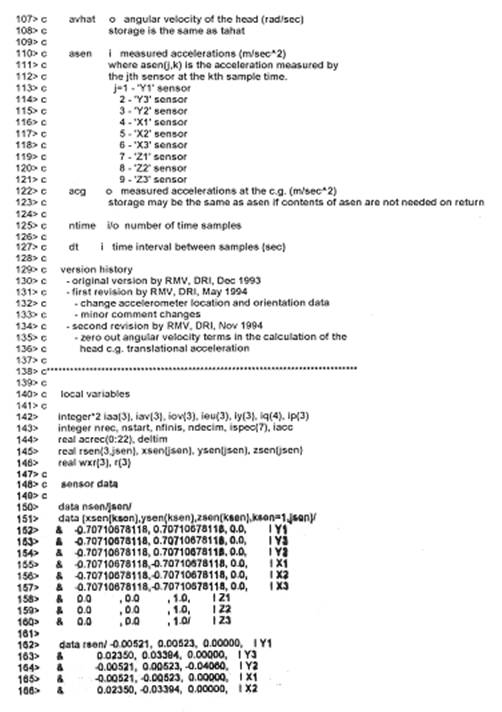
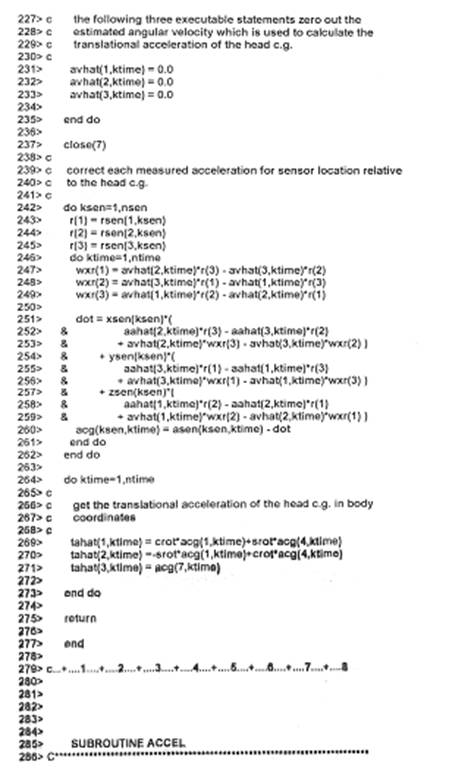
Mã chương trình máy tính dùng cho tính toán gia tốc dài và gia tốc góc của phần đầu
Chương trình máy tính tính toán các giá trị ax.H' ay,H' và az,H' và ax.H' ay.H' và az.H đưa ra chín gia tốc dài của phần đầu đo được theo thời gian. Các gia tốc của phần đầu đưa vào được liệt kê tại 4.1.1.
...
...
...
Mọi chi tiết xin liên hệ: ĐT: (028) 3930 3279 DĐ: 0906 22 99 66
...
...
...
Mọi chi tiết xin liên hệ: ĐT: (028) 3930 3279 DĐ: 0906 22 99 66
...
...
...
Mọi chi tiết xin liên hệ: ĐT: (028) 3930 3279 DĐ: 0906 22 99 66
...
...
...
Mọi chi tiết xin liên hệ: ĐT: (028) 3930 3279 DĐ: 0906 22 99 66
...
...
...
Mọi chi tiết xin liên hệ: ĐT: (028) 3930 3279 DĐ: 0906 22 99 66
Tất cả các tài liệu tham khảo được viện dẫn trong Phụ lục D đã được liệt kê trong Phụ lục B của TCVN 7973 -1.
D.1. Quy định của phạm vi áp dụng
Mục đích của tiêu chuẩn này là để cung cấp các phương pháp và thiết bị đo cho các phép đo có thể lặp lại trong phạm vi một điều kiện thử nghiệm và các phép đo có thể tái tạo lại qua các điều kiện thử nghiệm. Điều này có nghĩa là, một cách lý tưởng, trong một trường hợp va chạm cho trước thì các phép đo lặp lại (ví dụ phép phân tích lại một phim tốc độ cao) sẽ cho cùng một kết quả, và tất cả các phòng thử nghiệm sẽ nhận được cùng một kết quả. Điều này áp dụng đối với tất cả các khía cạnh của quá trình đo, bao gồm thông số kỹ thuật của cảm biến, phép hiệu chuẩn, cách ghi, sự bố trí máy quay, v.v…
...
...
...
Mọi chi tiết xin liên hệ: ĐT: (028) 3930 3279 DĐ: 0906 22 99 66
D.2. Yêu cầu (xem Điều 4)
D.2.1. Biến số đo bằng dụng cụ điện tử (xem 4.1)
D.2.1.1. Biến số yêu cầu (xem 4.1.1)
D.2.1.1.1. Chín gia tốc kế dùng để đo các gia tốc dài và gia tốc góc của phần đầu, theo phương pháp được phát triển bởi Padgaonkar (năm 1975). Điều này đòi hỏi một cảm biến ba trục trung tâm và ba cảm biến hai trục được đặt thẳng hàng với từng hệ trục tọa độ ba trục.
Chín biến số từ các cảm biến được kết hợp bằng phương pháp số học để tạo ra ba giá trị gia tốc dài và ba giá trị gia tốc góc như mô tả trong Phụ lục C. Sáu thành phần gia tốc này sau đó được kết hợp để tính toán chỉ số chấn thương sọ não như mô tả trong TCVN 7973-5.
D.2.1.1.2. Chuyển vị tương đối của xương ức giữa phần ngực đối với hộp xương sống ở ngực được ghi lại để cho phép thực hiện việc tính toán về nén và tốc độ nén phần ngực như đã định ra trong TCVN 7973-5. Các chuyển vị tam giác về bên trài và bên phải được cảm nhận như mô tả trong Hình 3. Điều này có nhiều lợi ích. Thứ nhất, nó cho phép thực hiện việc lắp đặt miếng đệm phần bụng dễ gãy mà thường gây cản trở đối với việc định vị máy chiết áp quay Hybrid III chuẩn trong phần ngực dưới. Thứ hai, việc đặt các máy chiết áp trên một trong hai mặt của hộp xương sống đã tính đến toàn bộ hành trình của đĩa xương ức. Thứ ba, việc sử dụng các phép đo riêng biệt ở bên trái và bên phải đã tính đến phép phân tích sau đó đối với chuyển vị không đối xứng của xương ức, mặc dù hiệu ứng này hiện tại không được tính đến trong chỉ số chấn thương vùng ngực.
D.2.1.1.3. Phép đo các chuyển vị phần trên và phần dưới chấp nhận các giá trị xấu nhất tại hai vị trí chấn thương trong việc tính toán các chi phí do chấn thương xem TCVN 7973-5.
D.2.1.1.4. Sáu thành phần lực và mômen phần cổ được ghi lại để có thể đánh giá các chấn thương vùng cổ trên như đã định ra trong TCVN 7973-5. Các lực và mômen này được cảm nhận trong vùng nối giữa xương - xương chẩm.
D.2.1.1.5. Ba thành phần lực và mômen phần xương đùi trên được ghi lại đối với mỗi chân để đánh giá các thiết bị bảo vệ chân. Các thành phần này không được sử dụng trực tiếp trong việc dự báo chấn thương nhưng được dùng để hỗ trợ phát hiện ra các nguồn tổn hại phần xương dễ gãy. Các mômen uốn ngang và uốn trước-sau lưng được ghi lại vì chúng là các mô men đối với hệ trục có thể gây chấn thương xương đùi dựa trên cơ sở các thử nghiệm trước đây và các dữ liệu ban đầu. Thành phần lực dọc trục cũng được ghi lại vì nó có thể góp phần gây ra chấn thương xương đùi, thông qua độ lệch của khớp hông. Các thành phần lực cắt là các biến số không bắt buộc vì chúng là các lực hoặc các chấn thương ít phổ biến hơn đối với phần chân trên. Cũng như vậy, thành phần mômen xoắn là không bắt buộc vì xương đùi có xu hướng tách ly khỏi sự xoắn bởi khớp cầu ở hông và bậc tự do tại đầu gối.
...
...
...
Mọi chi tiết xin liên hệ: ĐT: (028) 3930 3279 DĐ: 0906 22 99 66
D.2.1.2. Các biến số không nên dùng (xem 4.1.2)
Không nên ghi lại thành phần gia tốc phần ngực trong các thử nghiệm nghiên cứu va chạm mô tô, vì đối với các va chạm được phân bố trong không gian ba chiều, thì các phép đo này tiềm ẩn khả năng gây hiểu sai và có thể dẫn đến các kết luận sai lầm. Tiêu chuẩn gia tốc phần ngực hiện hành được rút ra từ các nghiên cứu trước đây về các tác động động lực học đối với chấn thương. Tiêu chuẩn về gia tốc phần ngực thừa nhận rằng phần ngực đóng vai trò như một phần thân cứng phải chịu tác dụng của toàn bộ gia tốc giảm dần của phần thân. Những mặt hạn chế kết hợp với sự áp dụng các tiêu chuẩn này và các phép đo kết hợp bao gồm: không có độ nhạy đối với vị trí va chạm, nghĩa là không thể tách được các gia tốc được ghi lại ở phần ngực từ hướng đi của các tải trọng qua đầu gối, cẳng chân, xương chậu, hông, vai và đầu; sự khuếch đại lực động lực do các va chạm cứng đối với phần vai Hybrid III cứng bị lộ ra; không có khả năng giải thích tác động của biến dạng phần ngực đối với sự tạo thành chấn thương; và độ nhạy của tiêu chuẩn đối với sự lắp đặt thử nghiệm va chạm.
Tương tự như vậy, việc đo và ghi lại các thành phần gia tốc phần xương chậu được xem là tiềm ẩn khả năng gây hiểu sai trong các va chạm mô tô, và do vậy, chúng không được giới thiệu. Các tiêu chuẩn về gia tốc xương chậu trước đây đã dựa trên cơ sở các khái niệm về chuyển động của toàn bộ phần thân. Chúng không tính đến các va chạm cứng với xương hông và các cấu trúc khác của xương chậu mà người lái mô tô có thể gặp phải, cũng như không tính đến sự khác nhau rất lớn về độ cứng vững giữa xương chậu con người và xương chậu Hybrid III bằng nhôm đúc. Xương chậu của con người khá mềm dẻo, với độ uốn tại chỗ rạn ở một số vùng lên tới 50 mm. Trong khi đó, xương chậu Hybrid III về bản chất là cứng, và điều này gây ra sự khuyếch đại lực động lực (so với các lực trên tử thi) khi nó bị va chạm bởi các cấu trúc cứng khác không thường thấy trong các va chạm phía trước ôtô, nhưng khá phổ biến trong các va chạm với ôtô từ nhiều hướng của mô tô. Sự khuếch đại lực này tiềm ẩn khả năng gây hiểu sai, và có thể dẫn đến các kết luận sai lầm.
D.2.1.3. Biến số cho phép (xem 4.1.3)
Nhìn chung, các biến số cho phép là những biến số mà các tiêu chuẩn về chấn thương chưa có tại thời điểm soạn thảo TCVN 7973 (ISO 13232), và/hoặc là những biến số có thể bổ sung thêm vào các biến số yêu cầu với mục đích phát hiện ra các nguồn chấn thương tiềm tàng. Các biến số này bao gồm: sáu trục của các lực và mômen vùng thắt lưng; các lực và mômen tác động đến xương đùi và xương ống chân mà có thể hữu ích, ví dụ như cho việc phát hiện các nguồn gãy xương chân.
Nhìn chung, các biến số phần xương đùi dưới và xương ống chân dưới là những biến số cho phép hơn là biến số yêu cầu vì chúng nằm trong vùng dễ gãy của các xương tương ứng. Điều này đòi hỏi việc sử dụng các tenxơmét bị phá huỷ trong tình huống va chạm. Các cảm biến xương ống chân trên cũng nằm trong vùng dễ gãy, nhưng là cần thiết cho việc đánh giá thiết bị bảo vệ chân vì chúng đưa ra một số chỉ báo về tải trọng xuất hiện tại đầu gối và đồng thời tại xương ống chân trên.
D.2.2. Biến số được đo bằng dụng cụ cơ khí (xem 4.2)
Như đã định ra ở các phần khác (ví dụ, trong phần cơ sở lý luận của ISO 13232-3 và TCVN 7973-5, do sự phân bố rộng rãi của các chấn thương tiềm tàng trên các vùng cơ thể này và do bản chất của các cấu trúc cơ thể tương ứng, hiện tại chưa có phương pháp thực nghiệm nào để cảm nhận bằng điện tử các biến số chấn thương vùng bụng, xương đùi, đầu gối và xương ống chân trên bề mặt rộng (ví dụ, dọc theo chiều dài và vòng quanh chu vi xương ống chân). Giải pháp thay thế được sử dụng ở đây là trực tiếp làm mô hình các cấu trúc cơ thể đó; là kết hợp chặt chẽ độ tin cậy của cơ cấu với hỏng hóc ; và sau đó là ghi lại các hỏng hóc (tức là sự xuất hiện các biến dạng hoặc nứt gãy) như là các tiêu chuẩn đánh giá trực tiếp đối với khả năng chấn thương.
D.2.3. Mục tiêu chụp ảnh cần được số hoá (xem 4.3)
...
...
...
Mọi chi tiết xin liên hệ: ĐT: (028) 3930 3279 DĐ: 0906 22 99 66
D.2.3.1. Điểm tâm của mũ bảo hiểm (xem 4.3.1)
Điểm tâm của mũ bảo hiểm là cần thiết để đo quỹ đạo và vận tốc của mũ bảo hiểm, hai biến số khả năng chấn thương mô tả trong TCVN 7973-5, khi va chạm với xe đối diện.
D.2.3.2. Mô tô (xem 4.3.2)
Các đường tâm hình chiếu phía trên, và phía sau, hoặc phía trước của mô tô là cần thiết để đo chuyển động lắc ngang ban đầu và góc va chạm tương đối của mô tô. Các mục tiêu tham chiếu phía trước hoặc phía sau khung chính là cần thiết đối với một thời điểm để tính toán tốc độ mô tô ngay trước khi va chạm.
D.2.3.3. Xe đối diện (xem 4.3.3)
Các đường tâm nắp capô, mui và nắp khoang phía sau của xe đối diện là cần thiết để đo và tính toán góc va chạm tương đối và điểm chạm ban đầu của xe đối diện. Thời điểm tham chiếu của mặt bên thân xe là cần thiết để tính toán tốc độ xe đối diện ngay trước khi va chạm.
D.2.3.4. Mặt đất (xem 4.3.4)
Các mục tiêu trên mặt đất được dùng như là các chuẩn đối với vị trí các mục tiêu của xe đối diện, trong quá trình phân tích phim.
Các mục tiêu đặt thẳng hàng thẳng đứng nhìn thấy được khi quan sát mô tô từ phía sau hoặc phía trước đưa ra một đường thẳng đứng tham khảo dùng để xác định góc lắc ngang của mô tô tại lúc chạm nhau đầu tiên của môtô/xe đối diện.
...
...
...
Mọi chi tiết xin liên hệ: ĐT: (028) 3930 3279 DĐ: 0906 22 99 66
Vị trí các mục tiêu khớp nối của người nộm là cần thiết để xác minh rằng người nộm không bị dịch chuyển khỏi vị trí ngồi chuẩn của nó trước va chạm môtô/xe đối diện.
D.2.4. Thông số kỹ thuật của cảm biến (xem 4.4)
D.2.4.1. Gia tốc kế phần đầu (xem 4.4.1.1)
Các gia tốc kế quy định phải tương thích với khung gia tốc kế đã nêu và với các yêu cầu về không gian bên trong, phạm vi đo, độ bền và độ chính xác của hình dạng đầu đã nêu. Khung gia tốc kế quy định phải tương thích với sự hạn chế về không gian của hình dạng đầu Hybrid III. Khoảng cách và việc đặt thẳng hàng chín gia tốc kế cần phải được chuẩn hoá để đảm bảo rằng các gia tốc góc giống nhau và các tỉ số tín hiệu - độ ồn tương tự nhau sẽ được đo đối với các thông số đầu vào giống nhau, tại tất cả các phương tiện thử. Sự đặt thẳng hàng có khoảng cách và được làm xiên đi đối với các trục của phần đầu cho độ nhạy chéo trục tối thiểu ngang qua toàn bộ dải đo của các chuyển động góc .
D.2.4.2. Cảm biến lực phần cổ trên (xem 4.4.1.2)
Cảm biến quy định phải tương thích với dạng đầu Hybrid III đặc biệt, với các khung cổ trên (xem ISO 13232-3) và với các yêu cầu về độ chính xác, độ nhám bề mặt, dải đo và độ nhạy chéo trục của người nộm Hybird III.
D.2.4.3. Chiết áp phần ngực (xem 4.4.1.3)
Bộ chuyển đổi chuyển vị quay phần ngực Hybrid III chuẩn đã được thay thế bởi một cụm thiết bị đo độ võng phần ngực, chỉ ra trên Hình 3. Cụm thiết bị này gồm có bốn chiết áp dây, một chiết áp trên, một chiết áp dưới trên mỗi mặt bên của hộp xương sống ngực người nộm. Việc sử dụng chuỗi chiết áp này là tương thích với điều khoản về phần bụng cảm nhận lực, giống như các giá đỡ cho các miếng đệm phần bụng dễ gãy gây cản trở việc sử dụng bộ chuyển đổi chuyển vị Hybrid III chuẩn.
Các chiết áp dây này là các chiết áp model 160-321 V của hãng Space Age Control, Inc. được sửa đổi đặc biệt dành riêng cho việc sử dụng để đo độ võng của xương sườn trong nghiên cứu va chạm phía trước và có tốc độ đáp ứng tối đa là 1,5 m/s ± 0,5 m/s ứng với giá trị ứng suất là 15,6 N. Đối với trường hợp ứng dụng này, tốc độ này được tăng thêm bởi khung dây của chiết áp được đặt xiên. Kết quả là có thể đo được vận tốc của xương ức lên tới 13,5 m/s (tương đương với vận tốc va chạm của phần ngực là 50 km/h).
...
...
...
Mọi chi tiết xin liên hệ: ĐT: (028) 3930 3279 DĐ: 0906 22 99 66
D.2.4.4. Cảm biến lực phần thắt lưng (xem 4.4.1.4)
Cảm biến quy định phải tương thích với các yêu cầu về độ chính xác, phạm vi đo, và độ nhạy chéo trục của người nộm Hybrid III.
D.2.4.5. Cảm biến lực phần xương đùi trên (xem 4.4.1.5)
Cảm biến đã nêu được thiết kế đặc biệt riêng cho người nộm trên mô tô và có đường kính ngoài nhỏ hơn rất nhiều so với cảm biến lực xương đùi trên Hybrid III chuẩn. Điều này giúp giảm bớt sự tương tác cứng với các kết cấu va chạm và sự khuếch đại lực có thể xảy ra. Sự khuếch đại lực do va chạm cảm biến trực tiếp vẫn có thể xuất hiện, nhưng nó đỡ khắc nghiệt hơn so với cảm biến lực chuẩn. Mặt khác, cảm biến lực này tương thích với các yêu cầu về hình học, độ chính xác, phạm vi đo, và độ nhạy chéo trục của các xương đùi dễ gãy và các thành phần của chân Hybrid III.
D.2.4.6. Tenxơmét xương chân dễ gãy (xem 4.4.1.6)
Vị trí của các tenxơmét xương đùi và xương ống chân được quy định để đảm bảo sẽ thực hiện được các phép đo để so sánh bằng các phương tiện thử khác nhau. Tenxơmét cụ thể và chi tiết việc lắp đặt cũng được quy định vì chúng sẽ ảnh hưởng đến độ chính xác, sai lệch và khả năng có thể so sánh được của các phép đo được thực hiện tại các phương tiện thử khác nhau. Các thông số kỹ thuật nằm trong phạm vi kỹ thuật chung của tenxơmét .
D.2.4.7. Cảm biến cơ khí (xem 4.4.2)
Bốn cảm biến này là cần thiết để đo các biến số chấn thương cho bốn vùng cơ thể này.
D.2.5. Thông số kỹ thuật của hệ thống thu nhận dữ liệu trong và hệ thống ghi (xem 4.5)
...
...
...
Mọi chi tiết xin liên hệ: ĐT: (028) 3930 3279 DĐ: 0906 22 99 66
D.2.5.1. Dây cáp ngoài không nên dùng (xem 4.5.1)
Không nên sử dụng các dây cáp ngoài vì chúng có thể làm sai lệch động học của người nộm do tác động của quán tính của chúng, do va chạm với người nộm, hoặc do tác động của sự căng dây. Hiện tại không có phương pháp nào có hiệu lực để bảo đảm chắc chắn rằng những hiệu ứng như vậy sẽ không xảy ra. Tác động do sự căng dây được minh hoạ nhờ sự mô phỏng cấu hình 143 trên máy tính ATB với một xe đối diện vận tốc 13,4 m/s va chạm với một mô tô đứng yên. Mô hình này sử dụng một mô hình dây treo ATB để nối phần sau khung xương chậu người nộm với phần sau bên phải của ghế ngồi mô tô nhằm mục đích xác định những tác động của một hoặc nhiều dây cáp nối với một số phần của mô tô. Độ cứng và độ bền của những dây cáp này đã được xác định từ các phép đo trong phòng thí nghiệm đối với một dây cáp thoả mãn các yêu cầu của 4.5.1 (Hình D.2). Tuy nhiên, cần lưu ý rằng độ bền lớn nhất của dây cáp không được nêu ra trong 4.5.1, và độ bền có thể lớn hơn rất nhiều (đồng thời sự sai lệch chuyển động trầm trọng hơn nhiều) so với các giá trị được sử dụng ở đây (xấp xỉ 400 N).
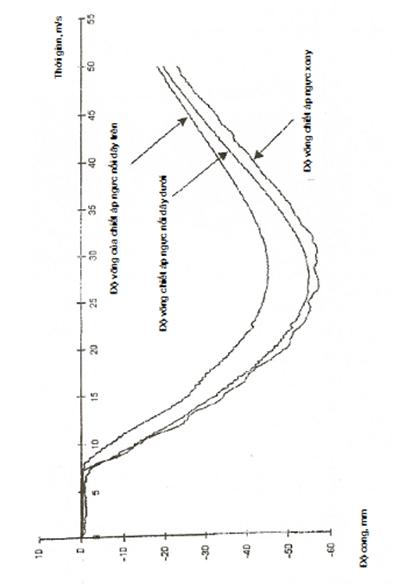
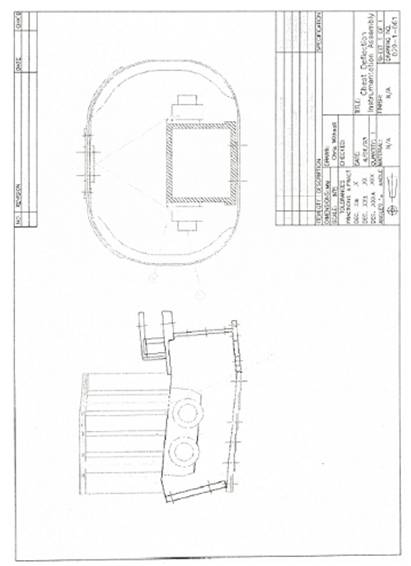
Hình D.1 - Các đường đặc tính theo thời gian của chiết áp ngực xoay và chiết áp ngực nối dây đối với va chạm khi được lắp trong lồng ngực Hybird III
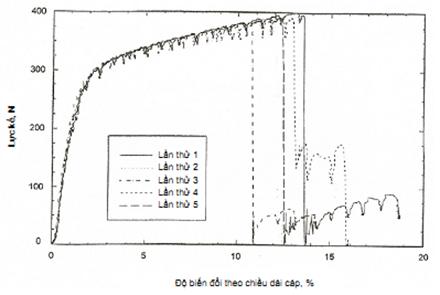
Hình D.2 - Lực / Độ võng của cáp (ví dụ)
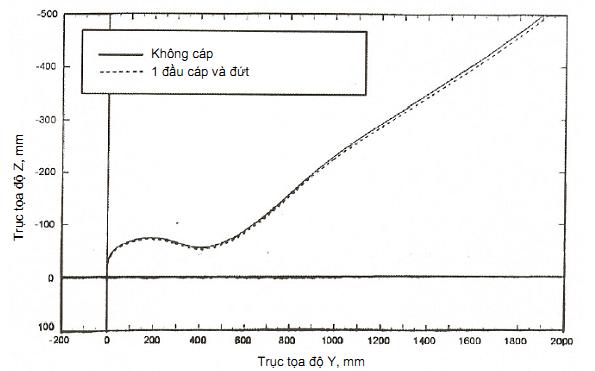
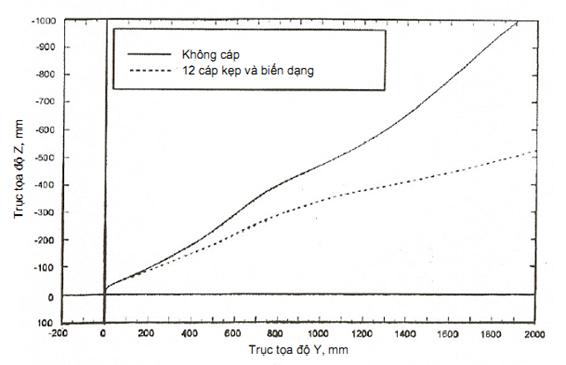
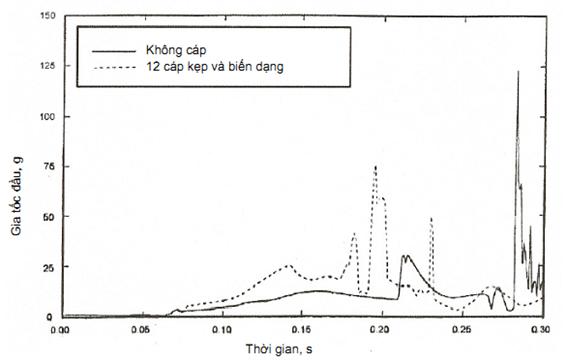
Các Hình từ D.3 đến D.7 chỉ ra những tác động của một dây cáp hãm (cáp kẹp) và bị đứt. Chỉ xuất hiện sai lệch chuyển động không đáng kể đối với độ bền chống đứt riêng này của cáp. Các hình từ D.8 đến D.12 chỉ ra những tác động của 12 dây cáp hãm (cáp kẹp) và bị biến dạng. Trong trường hợp này, các dây cáp bị căng ra và chịu biến dạng dẻo, nhưng không đứt. Chuyển động của người nộm bị tác động rất lớn. Việc kẹp nhiều hơn một dây cáp hoặc sử dụng các dây cáp khoẻ hơn cũng sẽ có thể làm sai lệch chuyển động của người nộm. Những sai lệch do tác động của cáp như vậy không có độ tin cậy sinh học và có thể dẫn tới những sai khác giữa các thử nghiệm, cũng như giữa các thiết bị thử.
Những dây cáp tự tháo ra tạm thời để cung cấp năng lượng ban đầu và tín hiệu từ cảm biến đụng chạm môtô/xe đối diện ban đầu là có thể chấp nhận được miễn là chúng tháo ra với một lực tối đa là 5 N. Với kinh nghiệm từ các thiết kế khả thi, sự tháo ra này xuất hiện trong giai đoạn va chạm ban đầu và không đủ độ lớn để tác động đáng kể đến chuyển động của người nộm.
Phần phía sau của xương chậu là vị trí nối thông thường đối với người nộm Hybrid III. Vị trí này đồng thời cũng gần với trọng tâm của toàn bộ người nộm, và do đó có thể giúp giảm thiểu sai lệch chuyển động của các chi hoặc của phần thân. Việc sử dụng một đầu nối gắn vào để giảm ứng suất được xem là một giải pháp kỹ thuật tốt.
...
...
...
Mọi chi tiết xin liên hệ: ĐT: (028) 3930 3279 DĐ: 0906 22 99 66
Sáu thử nghiệm tương tự nhau được tiến hành dưới các điều kiện được kiểm soát một cách chặt chẽ trong đó người nộm OPAT được buộc vào mô tô bởi một bộ cáp ngoài, như đã nêu trong 4.5.1. Độ dài của các dây cáp (12 m) được chọn để người nộm có thể bay qua mui xe ôtô và va chạm với mặt đất trước khi các dây cáp bị kéo căng. Khối lượng của các dây cáp (4 kg) được chọn trên cơ sở các thử nghiệm sơ bộ trong đó mô tô và người nộm đã được cho va chạm vào một vật cản khi có và không có các dây cáp.
Hình D.3 - Tác động mô phỏng của một dây cáp kẹp đối với quỹ đạo đầu người nộm
Hình D.4 - Tác động mô phỏng của một dây cáp kẹp đối với quỹ đạo phần thân trên người nộm
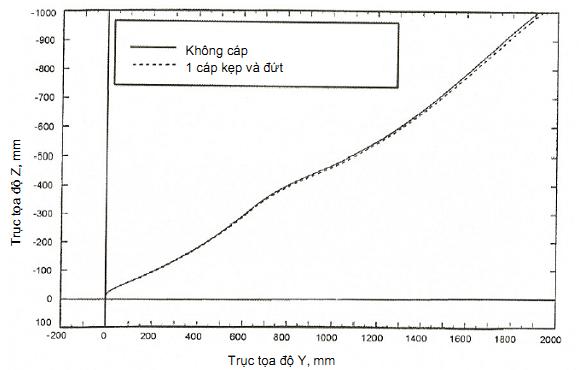 Hình D.5 - Tác động
mô phỏng của một dây cáp kẹp đối với quỹ đạo phần thân dưới người nộm
Hình D.5 - Tác động
mô phỏng của một dây cáp kẹp đối với quỹ đạo phần thân dưới người nộm
Hình D.6 - Tác động mô phỏng của một dây cáp kẹp đối với vận tốc của đầu người nộm
...
...
...
Mọi chi tiết xin liên hệ: ĐT: (028) 3930 3279 DĐ: 0906 22 99 66
Hình D.8 - Tác động mô phỏng của 12 dây cáp kẹp đối với quỹ đạo đầu người nộm
Hình D.9 - Tác động mô phỏng của 12 dây cáp kẹp đối với quỹ đạo thân trên người nộm
Hình D.10 - Tác động mô phỏng của 12 dây cáp kẹp đối với quỹ đạo thân dưới người nộm
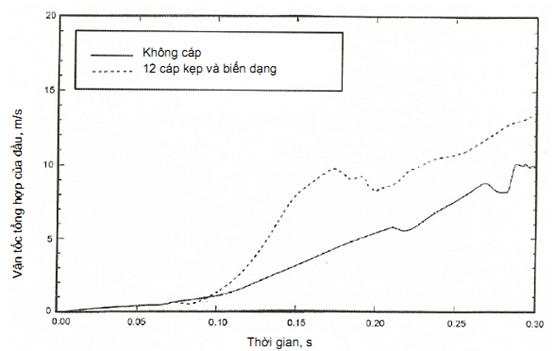
Hình D.11 - Tác động mô phỏng của 12 dây cáp kẹp đối với vận tốc của đầu người nộm
...
...
...
Mọi chi tiết xin liên hệ: ĐT: (028) 3930 3279 DĐ: 0906 22 99 66
Các kết quả thu được đối với thành phần vận tốc nằm ngang và vận tốc tổng hợp của phần đầu, được đo như trước. Kết quả của các thử nghiệm khi có cáp đã được so sánh với giá trị trung bình của các kết quả khi không có cáp và sai lệch được ghi lại: sai lệch cực đại của các thử nghiệm có cáp là nhỏ hơn hoặc bằng sai lệch cực đại của các thử nghiệm không cáp. Các thử nghiệm này được tiến hành dưới các điều kiện được kiểm soát, khi sử dụng các phương pháp và thiết bị có khả năng lặp lại cao.
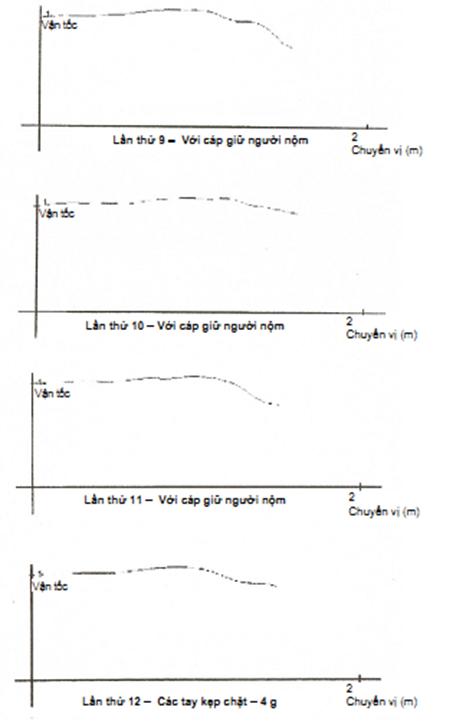
Các kết quả thu được được liệt kê trong các Bảng D.1 và D.2, và chỉ ra rằng, trong chuỗi các thử nghiệm riêng biệt trong phòng thí nghiệm này, đã không có tác động đáng kể nào của việc sử dụng các dây cáp ngoài được lắp theo đặc tính kỹ thuật đã cung cấp. Tất nhiên, trong các mô hình va chạm khác, có thể xảy ra khả năng các dây cáp mắc phải một số kết cấu. Các hình từ D.15a đến D.15d minh hoạ các đồ thị mối quan hệ giữa vận tốc và chuyển vị của chuỗi thử nghiệm được thực hiện tại Phòng thí nghiệm Nghiên cứu về giao thông này.
Đối với 16 thử nghiệm này, các phương pháp phân tích quỹ đạo của mũ bảo hiểm trong 5.2.4.2 đã được tuân theo, với hai ngoại lệ:
- tất cả các khung hình đã được số hoá và vận tốc được lọc;
- không phân tích hướng nhìn từ máy quay phía trên đầu.
Các phương pháp xếp đặt người nộm trong 5.3 của ISO 13232-6 được tuân theo với các ngoại lệ sau:
- xương đòn của người nộm OPAT được bố trí theo chỉ dẫn của nhà sản xuất;
- các khối lượng dùng để chỉnh đặt độ cứng của khớp nối được lựa chọn để đưa ra các giá trị g tương đương với các giá trị đã nêu trong các Bảng D.1, D.2 và Hình 15;
- các dữ liệu của thiết bị đo không được ghi lại đối với các thử nghiệm không có cáp;
...
...
...
Mọi chi tiết xin liên hệ: ĐT: (028) 3930 3279 DĐ: 0906 22 99 66
Hình D.13 - Thời gian thử nghiệm va chạm với tỷ lệ kích thước thực của mô tô tại gần đúng trọng tâm
Hình D.14 - Thời gian thử mẫu của mô tô dọc theo mặt phẳng trọng tâm dọc, sau đường tâm ngang
Bảng D.1 - Thành phần vận tốc được chuẩn hóa của điểm tâm của mũ bảo hiểm qua mặt phẳng AA’
Lần thử
Thành phần vận tốc được chuẩn hóa tại mặt phẳng AA’
Sai lệch so với giá trị trung bình 0,974 (sd=0,052)
Phần trăm sai lệch so với giá trị trung bình
...
...
...
Mọi chi tiết xin liên hệ: ĐT: (028) 3930 3279 DĐ: 0906 22 99 66
1
2
3
4
5a
6a
7a
8a
9a
...
...
...
Mọi chi tiết xin liên hệ: ĐT: (028) 3930 3279 DĐ: 0906 22 99 66
11a
12b
13b
14c
15c
16d
0,95
0,98
0,98
...
...
...
Mọi chi tiết xin liên hệ: ĐT: (028) 3930 3279 DĐ: 0906 22 99 66
0,91
0,93
0,96
0,90
0,99
1,06
1,00
0,98
0,98
...
...
...
Mọi chi tiết xin liên hệ: ĐT: (028) 3930 3279 DĐ: 0906 22 99 66
1,08
1,00
-0,024
0,006
0,006
-0,074
-0,064
-0,044
-0,014
...
...
...
Mọi chi tiết xin liên hệ: ĐT: (028) 3930 3279 DĐ: 0906 22 99 66
0,016
0,086
0,026
0,006
0,006
0,066
0,106
0,026
2,5
...
...
...
Mọi chi tiết xin liên hệ: ĐT: (028) 3930 3279 DĐ: 0906 22 99 66
0,6
7,6
6,6
4,5
1,4
7,6
1,6
8,8
2,7
...
...
...
Mọi chi tiết xin liên hệ: ĐT: (028) 3930 3279 DĐ: 0906 22 99 66
0,6
6,8
10,9
2,7
13,08
13,08
13,08
13,05
13,06
...
...
...
Mọi chi tiết xin liên hệ: ĐT: (028) 3930 3279 DĐ: 0906 22 99 66
13,04
13,04
13,04
13,10
13,02
13,08
13,08
13,09
13,06
...
...
...
Mọi chi tiết xin liên hệ: ĐT: (028) 3930 3279 DĐ: 0906 22 99 66
a Có các dây cáp nối với người nộm.
b Có các tay kẹp chặt; đặt lực căng khớp cổ tay, khuỷu tay và bả vai tới 4 g.
c Có các tay kẹp chặt; đặt lực căng khớp nối từ 1 g đến 2 g.
d Có các tay kẹp chặt; lực căng khớp cổ tay là 6 g, khuỷu tay là 4 g, bả vai là 2 g.
Bảng D.2 - Thành phần vận tốc tổng hợp được chuẩn hóa của điểm tâm của mũ bảo hiểm qua mặt phẳng AA’
Lần thử
Thành phần vận tốc được chuẩn hóa tại mặt phẳng AA’
Sai lệch so với giá trị trung bình 1,05 (sd =0,043)
Phần trăm sai lệch so với giá trị trung bình
...
...
...
Mọi chi tiết xin liên hệ: ĐT: (028) 3930 3279 DĐ: 0906 22 99 66
1
2
3
4
5a
6a
7a
8a
9a
...
...
...
Mọi chi tiết xin liên hệ: ĐT: (028) 3930 3279 DĐ: 0906 22 99 66
11a
12b
13b
14c
15c
16d
0,97
1,08
1,04
...
...
...
Mọi chi tiết xin liên hệ: ĐT: (028) 3930 3279 DĐ: 0906 22 99 66
1,00
0,99
1,06
0,97
1,03
1,08
1,01
1,00
1,02
...
...
...
Mọi chi tiết xin liên hệ: ĐT: (028) 3930 3279 DĐ: 0906 22 99 66
1,12
1,04
-0,08
0,03
-0,01
0,03
-0,05
-0,06
0,01
...
...
...
Mọi chi tiết xin liên hệ: ĐT: (028) 3930 3279 DĐ: 0906 22 99 66
-0,02
0,03
-0,04
-0,05
-0,03
0,03
0,07
-0,01
7,6
...
...
...
Mọi chi tiết xin liên hệ: ĐT: (028) 3930 3279 DĐ: 0906 22 99 66
1,0
2,9
4,8
5,7
1,0
7,6
1,9
2,9
3,8
...
...
...
Mọi chi tiết xin liên hệ: ĐT: (028) 3930 3279 DĐ: 0906 22 99 66
2,9
2,9
6,7
1,0
13,08
13,08
13,08
13,05
13,06
...
...
...
Mọi chi tiết xin liên hệ: ĐT: (028) 3930 3279 DĐ: 0906 22 99 66
13,04
13,04
13,04
13,10
13,02
13,08
13,08
13,09
13,06
...
...
...
Mọi chi tiết xin liên hệ: ĐT: (028) 3930 3279 DĐ: 0906 22 99 66
a Có các dây cáp nối với người nộm.
b Có các tay kẹp chặt; đặt lực căng khớp cổ tay, khuỷu tay và bả vai tới 4 g.
c Có các tay kẹp chặt; đặt lực căng khớp nối từ 1 g đến 2 g.
d Có các tay kẹp chặt; lực căng khớp cổ tay là 6 g, khuỷu tay là 4 g, bả vai là 2 g.
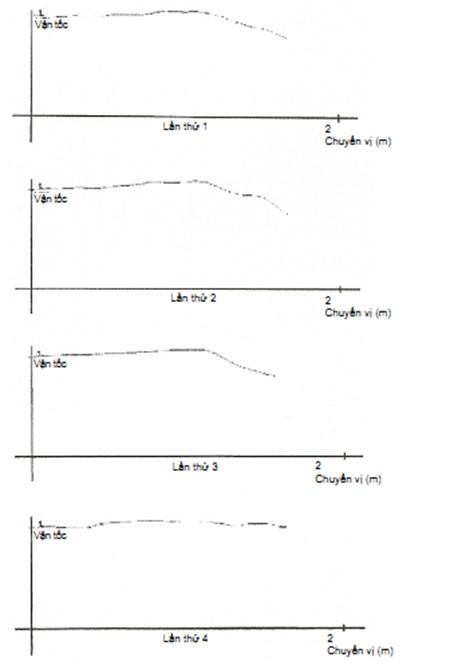
Hình D.15a - Đồ thị thành phần vận tốc tiến của trọng tâm mũ bảo hiểm theo chuyển vị
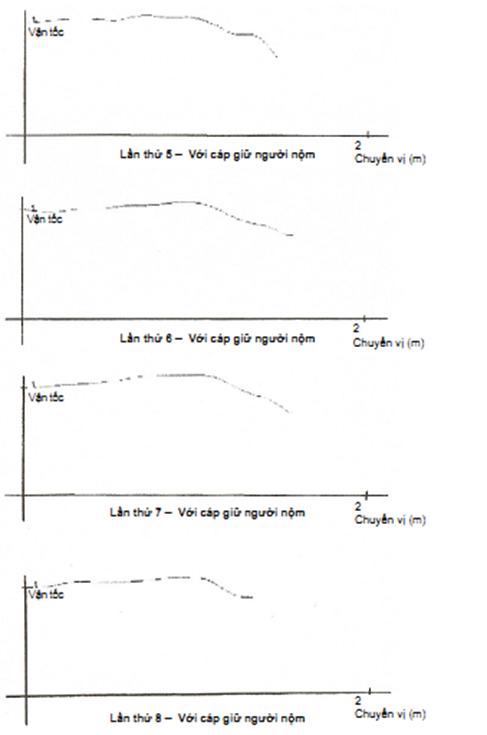
Hình D.15b - Đồ thị thành phần vận tốc của điểm tâm của mũ bảo hiểm theo chuyển vị
...
...
...
Mọi chi tiết xin liên hệ: ĐT: (028) 3930 3279 DĐ: 0906 22 99 66
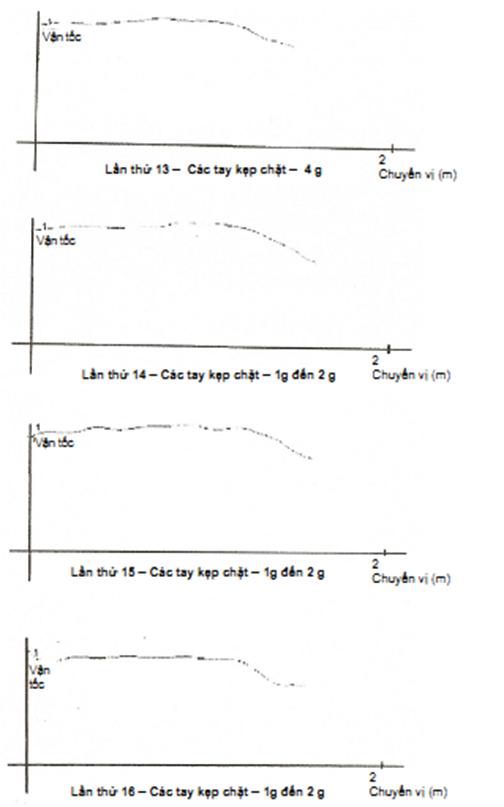
Hình D.15d - Đồ thị thành phần vận tốc của điểm tâm của mũ bảo hiểm theo chuyển vị
- người nộm được đặt vào vị trí giống như đối với thử nghiệm với tỷ lệ kích thước thực;
- mũ bảo hiểm là loại che nửa đầu Top Tek Nimrod;
- hệ thống treo trước và bánh trước của mô tô được sửa đổi để môtô có thể quay quanh trục bánh xe tới mức độ giống như trong thử nghiệm với tỷ lệ kích thước thực, nhưng nó không bị biến dạng;
- các tay kẹp chặt chỉ được lắp trong năm thử nghiệm, như đã chỉ ra trong Bảng D.1, D.2 và Hình 15.
D.2.5.2. Hệ thống thu dữ liệu (xem 4.5.2)
Số lượng 32 kênh được xem như là yêu cầu tối thiểu để ghi lại 28 biến số yêu cầu và các biến số cho phép khác mà có thể được quan tâm.
Tốc độ lấy mẫu 10 kHz tiêu biểu cho thực tế phổ biến của thử nghiệm va chạm môtô; tương thích với hệ thống thu nhận dữ liệu khả thi hiện hành; đưa ra sự đáp ứng tần số đầy đủ đối với tất cả các tín hiệu bao gồm cả những tín hiệu có thể trong khoảng 0,001 s (ví dụ như lực ở chân hoặc gia tốc phần đầu); và tương thích với các phương pháp xử lý tín hiệu đã nêu trong ISO 6487. Chiều rộng dải tín hiệu tương tự (analog) 2,5 kHz được xem là tương đương với tốc độ lấy mẫu nêu trên xét về tỉ số chia tách tần số chống alias điển hình 4:1.
...
...
...
Mọi chi tiết xin liên hệ: ĐT: (028) 3930 3279 DĐ: 0906 22 99 66
Điện áp kích thích của các cảm biến được quy định nhằm tránh các vấn đề liên quan đến các tỉ số tín hiệu - độ ồn thấp và các thay đổi tín hiệu do sự tự sấy nóng. Các giá trị được đưa ra là các giá trị danh định nằm trong phạm vi của các thiết bị, và được chủ định để tiêu chuẩn hoá hoạt động của các cảm biến.
D.2.5.4. Lọc chống alias cho hệ thống số (xem 4.5.2.2)
Dữ liệu được lấy mẫu có thể bị sai lệch do chuyển tiếp tần số cao - tần số Nyquyst bị alias (bằng nửa tần số lấy mẫu). Việc lọc chống alias được chủ định để giảm những sai lệch như vậy. Điều này là đặc biệt quan trọng khi đang sử dụng các giá trị đo đỉnh cho việc đánh giá chấn thương.
ISO 6487 không chú tâm đến vấn đề chống alias.
Độ suy giảm theo quy định ít nhất là 40 dB đã nêu là phù hợp với SAE J211, tiêu chuẩn này yêu cầu độ alias dưới 1 % ứng với tần số được quan tâm (Fh, điển hình là 1 000 Hz).
Đặc điểm “tại tần số 7 kHz hoặc lớn hơn” đã mở rộng phạm vi tần số chống alias được giới thiệu của SAE từ 1 kHz lên đến 3 kHz (nghĩa là, “trên 7 kHz”, tần số Nyquyst là 5 kHz, để “thấp hơn 3 kHz”). Điều này được trông đợi từ khi SAE J211 (năm 1988) cho phép xảy ra alias tại bất kỳ giá trị tần số nào lớn hơn Fh, và do đó có thể làm sai lệch sự phân tích dữ liệu (tức là sự lựa chọn các giá trị cực đại). Trong các yêu cầu đã nêu, có thể xuất hiện alias tại tần số trên 3 kHz, tuy nhiên, nó sẽ bị suy giảm đáng kể bởi bộ lọc theo ISO 6487 (năm 1987) đã nêu trong 5.2 và được dành cho một mục đích khác. Do vậy, yêu cầu ở đây là dành cho mức độ lọc chống alias thấp nhất trước khi số hoá,
D.2.5.5 Thông số kỹ thuật của bộ chuyển đổi từ tín hiệu tương tự sang tín hiệu số của hệ thống số (xem 4.5.2.3)
Sự chuyển kênh tối đa theo quy định là tương thích với các đặc tính của hệ thống thu nhận dữ liệu trong 32 kênh khả thi hiện tại, và tuân thủ tốt yêu cầu của ISO 6487. Độ phân giải tối thiểu 8 bit tương đương với từ 0 đến 256 lần đếm, hay nói cách khác là tương đương với độ phân giải cao hơn 0,4 % dải đo qua hệ thống chuyển đổi tín hiệu tương tự sang tín hiệu số. Độ phân giải vật lý cũng có liên quan đến việc sử dụng phép xác định thang đo chuẩn hoá của các biến số (xem D.2.5.8). Điều này nằm trong các yêu cầu của Hệ thống Thử nghiệm Đánh giá U.S. DOT NHTSA dựa trên việc thử nghiệm với hệ thống 8 bit hiện tại (theo Radwan và Nickles, năm 1991) (WG22/N41/Phụ lục 7). Hệ thống thử nghiệm 8 bit kết hợp với các yêu cầu của SAE J211 (năm 1988) và ISO 6487 (năm 1987) và đồng thời, trong thực tế, cũng yêu cầu một độ phân giải tối thiểu là 6,5 bit. Độ nhạy nhiệt khuếch đại đã nêu là thích hợp với hệ thống thu nhận dữ liệu khả thi hiện tại.
D.2.5.6. Khả năng lưu trữ (xem 4.5.2.4)
...
...
...
Mọi chi tiết xin liên hệ: ĐT: (028) 3930 3279 DĐ: 0906 22 99 66
D.2.5.7. Thông số kỹ thuật về mặt cơ khí của hệ thống thu nhận dữ liệu bên trong (xem 4.5.2.5)
Thể tích bên trong của hộp xương sống phần ngực và của khung xương chậu đứng/ngồi sửa đổi là hai vùng của người nộm không chứa các thiết bị yêu cầu khác hay trực tiếp tác động đến các đặc tính lực/độ uốn (độ tin cậy sinh học) của người nộm. Theo đó, chúng tạo không gian hữu ích cho hệ thống thu nhận dữ liệu. Khối lượng của phần thân trên và phần thân dưới được giữ nguyên giống như các khối lượng tương ứng của người nộm Hybrid III chuẩn nhằm mục đích bảo đảm sự thay đổi nhỏ nhất từ các thuộc tính của người nộm đang xét và chuẩn hoá các khối lượng của người nộm lái xe. Bản chất của khối lượng và trọng tâm của hộp xương sống phần ngực, và tất cả các mômen quán tính và quán tính của hộp xương sống phần ngực, phần thân trên và phần thân dưới không được quy định trong đặc tính của Hybrid III, và có thể thay đổi. Tuy nhiên, các mômen quán tính của phần thân trên người nộm lái xe trên đó có gắn hệ thống thu nhận dữ liệu khả thi hiện có là rất gần với các mômen quán tính của phần thân trên Hybrid III mẫu chuẩn được đo.
Đặc tính của sự va chạm cơ khí được tính đến để đảm bảo rằng hệ thống ghi lại dữ liệu một cách chính xác khi phải chịu một va chạm đặc trưng cho các va chạm bắt gặp trong thử nghiệm va chạm mô tô. Điều này phù hợp với đặc tính của hệ thống thu nhận dữ liệu khả thi hiện có. Các điều kiện đặc trưng riêng là các điều kiện được đáp ứng bởi một thiết bị khả thi (theo White và Gustin, năm 1989).
D.2.5.8. Xác định thang đo của các biến số (xem 4.5.2.6)
Các phạm vi ghi trong Bảng 4 thừa nhận việc sử dụng một bộ ghi 8 bit và được chuẩn hoá sao cho tất cả các thiết bị đều sử dụng cùng một phạm vi động lực và có nền tảng là một độ phân giải tương tự nhau cho tất cả các kênh ghi. Các giá trị nêu trong Bảng 4 bao hàm sự thỏa hiệp giữa sự vượt quá phạm vi ở giới hạn trên và sự phân giải ở giới hạn dưới. Các giá trị được đưa ra tương đương với khoảng 130 % các cấp độ chấn thương cực đại được đánh giá đối với mỗi vùng cơ thể, như được nêu ra trong TCVN 7973 -5 : 2008 đối với phần đầu và ngực, và trong ISO 13232-3 đối với các lực và mômen phần chân; hoặc các tín hiệu được ghi có thể là cực đại, dựa trên kinh nghiệm thử nghiệm trước đây. Việc ghi lại các phạm vi lớn hơn bằng bộ ghi 8 bit được xem là không cần thiết, theo quan điểm đánh giá chấn thương, và làm suy giảm độ phân tối thiểu trên giới hạn dưới.
Đối với các bộ ghi có độ phân giải cao hơn 8 bit, phạm vi ghi có thể được tăng lên để tăng sự vượt quá phạm vi ở giới hạn trên của thang đo miễn là độ phân giải thực của giới hạn dưới, bao gồm cả tiếng ồn, là tương đương hoặc tốt hơn so với bộ ghi 8 bit.
D.2.6. Chụp ảnh tốc độ cao (xem 4.6)
D.2.6.1. Thông số kỹ thuật của máy quay (xem 4.6.1)
Yêu cầu đối với các máy quay, ống kính, vị trí máy quay, đường ngắm và điểm ngắm phải như nhau trong tất cả các thử nghiệm so sánh theo cặp nhằm tránh tình trạng thường gặp trong các thử nghiệm trước đây, ví dụ như không thể so sánh các điểm chạm nhau của xe đối diện do sự khác biệt lớn về vị trí máy quay. Vị trí, tiêu cự và trường nhìn của máy quay được dẫn chứng bằng tài liệu để phục vụ cho các mục đích kiểm tra và để làm cho quá trình hiệu chỉnh sự phối cảnh có tính khả thi, nếu cần.
...
...
...
Mọi chi tiết xin liên hệ: ĐT: (028) 3930 3279 DĐ: 0906 22 99 66
Các đèn định giờ bên trong được yêu cầu để ghi lại bằng chụp ảnh theo thời gian thực của các hiện tượng đâm nhau hơn là dựa vào tốc độ ảnh danh định của máy quay. Tốc độ cửa chập có thể góp phần vào khoảng mờ quan sát thấy trong phim tốc độ cao. Yêu cầu đối với tốc độ cửa chập là cần thiết để kiểm soát chất lượng sự lộ sáng. Giá trị khoảng mờ cực đại là 0,020 mm đã tính đến yêu cầu độ chính xác ± 1 cm để xác định điểm chạm nhau khi va chạm nằm trong phạm vi dung sai quy định trong ISO 13232-6. Hơn nữa, nó thấp hơn giá trị 0,050 mm, là giá trị giới hạn trên đối với phép phân tích phim tốc độ cao 16 mm (theo Hyzer, năm 1962).
Tốc độ khung hình danh định 400 khung mỗi giây nêu trong Bảng 5 được xem như đưa ra độ phân giải thời gian đủ cho sự chạm nhau đầu tiên giữa môtô và xe đối diện, được xem là đủ cho mục đích phân tích phim mô tả dưới đây, và được xem như đưa ra đủ sự minh bạch đối với một dải điều kiện bố trí ánh sáng rộng.
Bốn máy quay yêu cầu là bốn máy quay cần thiết cho phép phân tích định lượng các điều kiện va chạm ban đầu cũng như quỹ đạo mũ bảo hiểm trong suốt giai đoạn va chạm đầu tiên. Vì những lý do đó, cần quy định các yêu cầu đối với trường nhìn và đường ngắm.
Các đặc tính kỹ thuật trong Bảng B.1 được dùng để cung cấp một nền tảng chung cho trường nhìn (liên quan đến độ phân giải của phép phân tích phim), tiêu cự ống kính (liên quan đến sự phối cảnh hiện trường), và khoảng thời gian phân tích phim (liên quan đến tốc độ lấy mẫu). Bề rộng trường nhìn đã được lựa chọn theo cách để đạt được sự hài hoà giữa:
- giữ cho mũ bảo hiểm ở trong tầm nhìn máy quay, theo lý tưởng là trong khoảng thời gian lên tới 0,600 s (0,100 s trước và 0,500 s sau sự chạm nhau đầu tiên giữa mô tô và xe đối diện);
- giảm đến mức tối thiểu chiều rộng trường nhìn để cải thiện độ phân giải của mục tiêu (đến xấp xỉ 1 cm). Chiểu cao trường nhìn dựa trên bề rộng trường nhìn nhân với tổng số khung phim 16 mm. Tiêu cự tối thiểu của ống kính dựa trên kỹ thuật hiện tại, và là sự cố gắng giảm thiểu sai lệch phối cảnh khi duy trì khoảng cách khả thi của máy quay (ví dụ như chiều cao). Độ méo của các ống kính với các giá trị tiêu cự quy định là không đáng kể. Các khoảng thời gian phân tích phim được lựa chọn để cung cấp một tỉ số “tín hiệu đối với độ ồn” (“signal to noise” - S/N) sấp xỉ 6:1, trong đó “tín hiệu” là chuyển động của phần đầu giữa hai khung phân tích phim liên tiếp; và “độ ồn” tượng trưng cho độ phân giải của mắt người trên một màn số hoá rộng 300 mm (được ước lượng vào khoảng 0,2 % bề rộng của màn dựa theo kinh nghiệm thực hành). Khi khoảng thời gian phân tích phim tăng lên, tín hiệu cũng tăng lên. Khi tỉ số S/N tăng lên đến một giá trị lớn hơn 6, độ phân giải sẽ bị suy giảm. Với các giá trị S/N nhỏ hơn 6, kinh nghiệm chỉ ra rằng cần có nhiều bộ lọc số hoá hơn để đưa ra các thời gian “êm dịu” hợp lý (và điều này dẫn đến sự sai lệch quá mức của). Do vậy, một tỉ số S/N bằng 6 được xem là tượng trưng cho một điều kiện thuận lợi nhất.
D.2.7. Ảnh dùng để kiểm tra vị trí người nộm (xem 4.7)
Nếu sử dụng phép chụp ảnh tĩnh, các bức ảnh tĩnh cỡ phim 35 mm, trường nhìn và các yêu cầu về phối cảnh cho việc kiểm tra vị trí người nộm sẽ dẫn đến một sai số đo tổng tiềm tàng vào khoảng 0,1 % (đây là sai số số hoá thủ công điển hình của phim cỡ 35 mm) nhân với 4 m (trường nhìn), hoặc vào khoảng 0,5 cm. Phương pháp này cũng hỗ trợ việc giảm thiểu cả hai sai số dạng 1 trong việc bác bỏ thử nghiệm khi không có chuyển động thực của người nộm.
Nếu sử dụng các phương pháp ghi ảnh thay thế thì cần phải thu được và chứng minh được một độ phân giải tương đương.
...
...
...
Mọi chi tiết xin liên hệ: ĐT: (028) 3930 3279 DĐ: 0906 22 99 66
D.3. Phương pháp đo (xem 5)
D.3.1. Phép đo trước thử nghiệm có liên quan đến sự rút gọn dữ liệu (xem 5.1)
Phép đo đối với các mục tiêu trên mặt đất,các mục tiêu của mô tô và xe đối diện, và điểm tâm của mũ bảo hiểm cho phép áp dụng phép hiệu chỉnh khoảng cách như đã định rõ trong 5.2. Việc đo khoảng cách giữa các công tắc tiếp xúc là cần thiết cho việc tính toán vận tốc ban đầu. Việc đo chiều rộng toàn bộ của xe đối diện cần thiết cho việc tính toán điểm chạm nhau của xe đối diện.
Việc phủ một mô hình lưới đối với bất cứ máy quay tốc độ cao nào có tiêu cự ngắn hơn sẽ cho phép thực hiện việc hiệu chỉnh độ méo của từng khung hình một trong trường hợp sử dụng các tiêu cự ngắn không được giới thiệu này.
D.3.2. Rút gọn dữ liệu (xem 5.2)
D.3.2.1. Dữ liệu điện tử (xem 5.2.1)
Mốc dữ liệu 0 có thể được định ra bằng việc xác định giá trị trung bình của các dữ liệu trong khoảng 0,050 s trước mốc thời gian 0, vì bất cứ trạng thái lực, chuyển động hoặc gia tốc ổn định nào trước lúc chạm nhau đầu tiên giữa môtô/xe đối diện đều có thể được xem là không đáng kể. Việc lưu giữ lại 3 chữ số có nghĩa là phù hợp với độ chính xác của các cảm biến điện tử và độ chính xác tổng yêu cầu của các phép đo. Cụm từ “đáp ứng tần số của dữ liệu đầu ra đối với tín hiệu tương tự chưa lọc đầu vào” làm sáng tỏ cách mà các bộ lọc theo ISO 6487 được ứng dụng. Việc chia các dữ liệu thành các cửa sổ sơ cấp và thứ cấp nhằm tạo điều kiện thuận lợi cho việc dựng đồ thị các dữ liệu; và nhìn chung nhằm phân biệt các tác động có khuynh hướng liên quan đến sự chạm nhau với xe đối diện (sơ cấp) với các tác động có khuynh hướng liên quan hơn đến sự chạm nhau với mặt đất (thứ cấp). Việc định nghĩa nội dung tập tin điện tử nhằm nâng cao sự trao đổi dữ liệu. Việc tính toán các gia tốc góc của phần đầu được dựa trên phương pháp 9 cảm biến được Padgaonkar và những người khác đưa ra năm 1975. Chương trình máy tính thực hiện các phép tính toán cần thiết được cung cấp bởi Transport Canada, Biokinetics và Dynamic Research.
Do các hạn chế về mặt cơ khí nên điểm chuẩn tải trọng đối với cảm biến lực phần cổ trên không tương đương với vị trí của u đầu xương chẩm. Sự biến đổi các mômen phần cổ từ điểm tham khảo tải trọng của cảm biến lực đến vị trí của u đầu xương chẩm bằng cách sử dụng các quy trình trong SAE J1733 sẽ dẫn đến là các mômen tại một vị trí trong phần cổ, đó là một vị trí thường gặp để tham chiếu và mô tả các tải trọng ở cổ người cũng như dẫn đến các chấn thương.
D.3.2.2. Hiệu chỉnh các tenxơmét phần xương dễ gãy (xem 5.2.2)
...
...
...
Mọi chi tiết xin liên hệ: ĐT: (028) 3930 3279 DĐ: 0906 22 99 66
- bản thân các tenxơmét;
- các cấu trúc để lắp các tenxơmét lên đó;
- quy trình lắp các tenxơmét;
- sự định vị và định hướng vật lý các tenxơmét;
- cách nối điện tử các tenxơmét với nhau để tạo thành các cảm biến.
Các yếu tố nói trên có thể ảnh hưởng đến độ nhạy sơ cấp (tín hiệu đầu ra tạo ra bởi lực và mômen đang được đo) cũng như đến độ nhạy chéo trục (tín hiệu đầu ra tạo ra bởi các lực và mômen trực giao với lực và mômen đang được đo).
Ví dụ như, khi giám sát mômen uốn Mx trên đoạn xương ống chân dễ gãy, một tenxơmét đơn lẻ lắp trên bề mặt bên của xương và được mắc như cảm biến cầu 1/4 sẽ cho một tín hiệu tỉ lệ với Mx (độ nhạy sơ cấp). Một tenxơmét giống như vậy sẽ cho một tín hiệu cũng tỉ lệ với các tải trọng hướng trục (độ nhạy chéo trục).
Mặt khác, hai tenxơmét được lắp trên hai bề mặt bên đối diện của xương, được mắc một cách hợp thức như một cụm cầu 1/2, đo Mx và không chịu tải trọng hướng trục (tức là độ nhạy chéo trục). Tuy nhiên, nếu không được lắp thẳng hàng một cách chính xác với trục y, thì hai tenxơmét tương tự có thể cho các tín hiệu My chéo trục.
Quy trình hiệu chuẩn tenxơmét đã nêu cung cấp một cách thức để đo đạc và định lượng các độ nhạy sơ cấp và chéo trục. Các giá trị chéo trục cực đại cho phép được lựa chọn dựa trên một khảo sát về các độ nhạy chéo trục có được từ việc lắp đặt các tenxơmét trên các xương dễ gãy. Chúng được chọn để nhận biết việc lắp đặt tenxơmét có khuyết tật mà không cần đến việc loại bỏ không cần thiết các tenxơmét có thể chấp nhận được.
...
...
...
Mọi chi tiết xin liên hệ: ĐT: (028) 3930 3279 DĐ: 0906 22 99 66
Việc mất một chân trong suốt một thử nghiệm có thể ảnh hưởng đến chuyển động toàn bộ của người nộm, và do vậy, nên được ghi chép trong bản báo cáo.
D.3.2.4. Các xương đùi và xương ống chân (xem 5.2.3.1)
Vết gãy của xương sẽ bắt đầu tại một vị trí cục bộ có ứng suất kết hợp được tạo ra bởi việc chất tải bên ngoài vượt quá độ bền kéo của mô xương. Mặc dù có thể đo được sự phân bố ứng suất trên một xương, nhưng về mặt lý thuyết, các cơ cấu và chỉ số tổng quát đối với vết gãy xương do sự chất tải động lực học vẫn chưa được thiết lập. Giả sử như đã có thể trang bị dụng cụ cho chân người để kiểm soát khắp cả xương về các điều kiện thúc đẩy nhanh việc hình thành vết gãy, và điều này được thực hiện với một phạm vi rộng các con người (tử thi) chịu các điều kiện chất tải bên ngoài, thì đã có thể đưa ra một hàm đánh giá sự phân bố xác suất chấn thương theo kinh nghiệm. Nhưng điều này đã không xảy ra.
Trong mọi trường hợp, các chân người nộm không thể sẵn sàng cho việc trang bị dụng cụ để kiểm soát theo sự phân bố ứng suất (hoặc biến dạng) liên tục. Nếu có thể như vậy, thì vẫn không thể biết được mối quan hệ giữa các phép đo này với sự phân bố xác suất độ nghiêm trọng chấn thương được kỳ vọng. Việc trực tiếp lập mô hình các xương chân do vậy vẫn được lựa chọn như là phương pháp tiếp cận hợp lý duy nhất có hiệu lực.
D.3.2.5. Xoắn xương đầu gối và các chốt trượt (xem 5.2.3.2)
Có 2 chốt trượt bằng đồng trong khớp gối dễ gãy: một chốt kiểm soát các chuyển động quay quá ngưỡng quanh trục xương ống chân, chốt thứ hai kiểm soát các chuyển động quay quá ngưỡng theo hướng làm vẹo xương vào trong/ra ngoài. Các chuyển động quay theo cả hai hướng đó, khi không có sự hư hỏng của chốt kéo, được cho phép bởi sự nén của các khớp trụ xoay đàn hồi. Tuy nhiên, nếu khớp gối chịu đựng một chuyển động quay đủ để các lực cản lò xo của khớp trụ xoay đạt tới giá trị tải trọng phá hủy của các chốt trượt bằng đồng thì các chốt này sẽ trượt, cho biết đã đạt tới các giá trị tải trọng phá hủy thiết kế của khớp gối. Các giá trị tải trọng phá hủy này xuất phát từ các kết quả của một nghiên cứu được thực hiện bằng các thử nghiệm chất tải gần như tĩnh lên các khớp gối tử thi (Ahmed và McLean năm 1988; St.Laurent và những người khác năm 1989a).
Một sự hư hỏng của chốt trượt xoắn sẽ mô phỏng sự xé ra của tổ hợp dây chằng/ mặt xương khum khỏi trạng thái bình ổn của xương chày, và sẽ được kết hợp với hư hỏng của phía trước chữ thập. Một sự hư hỏng của chốt trượt gây vẹo xương sẽ mô phỏng sự hư hỏng của dây chằng bên và dây chằng trước chữ thập. Các chấn thương kết hợp với một trong hai kiểu hư hỏng này chỉ dẫn đến một sự trật khớp cục bộ của khớp gối. Các chấn thương kết hợp với các hư hỏng đồng thời của các chốt trượt xoắn và làm vẹo xương là tượng trưng cho sự trật khớp hoàn toàn của khớp gối.
D.3.2.6. Miếng đệm phần bụng (xem 5.2.3.3)
Sự biến dạng của miếng đệm dễ gẫy phần bụng được xem là tượng trưng cho sự xâm nhập lớn nhất ở phần bụng (theo Rouhana và những người khác, năm 1989). Đến lượt mình, sự xâm nhập lớn nhất ở phần bụng lại được xem là có tương quan với độ nghiêm trọng chấn thương phần bụng. Do vậy, việc đo giá trị pA,max từ miếng đệm dễ gẫy phần bụng có thể được sử dụng để đánh giá độ nghiêm trọng của chấn thương phần bụng phải chịu trong suốt thử nghiệm va chạm mô tô.
...
...
...
Mọi chi tiết xin liên hệ: ĐT: (028) 3930 3279 DĐ: 0906 22 99 66
D.3.2.7. Phép phân tích theo thời gian (xem 5.2.4.1)
Quy định “10 khung phân tích phim trước sự chạm nhau đầu tiên giữa môtô/xe đối diện” vì nó tương ứng với ít nhất 0,050 s trước sự chạm nhau đầu tiên giữa môtô/xe đối diện, theo Bảng B.1, tương đương với khoảng thời gian sử dụng cho việc ghi điện tử; và bởi vì khoảng thời gian tương đương 10 khung phân tích phim có thể được yêu cầu để cho phép bộ lọc vị trí số trở nên ổn định. “80 khung phân tích phim sau sự chạm nhau đầu tiên giữa môtô/xe đối diện” gần tương ứng với điểm cuối của sự va chạm sơ cấp, va chạm mà được định ra trên danh nghĩa là sẽ kết thúc vào thời điểm 0,500 s sau sự chạm nhau đầu tiên giữa môtô/xe đối diện.
D.3.2.8. Phép phân tích quỹ đạo của mũ bảo hiểm (xem 5.2.4.2)
Tính năng của máy phân tích chuyển động phim đã được quy định để có thể nhận được các mức độ phân giải như nhau từ các thiết bị thử nghiệm khác nhau.
Khoảng thời gian phân tích phim thực được sử dụng dựa trên một công thức kinh nghiệm, công thức này lại được dựa trên cơ sở lý luận của 4.6.2.
“Sự thay đổi khung hình máy quay” (tức là của máy quay) được loại trừ bằng việc sử dụng một mục tiêu cố định trên mặt đất.
Sự hiệu chỉnh chiều sâu được sử dụng để giải thích nguyên nhân sự thay đổi tỉ xích do tầm nhìn phối cảnh của máy quay (tức là việc thu gọn các đoạn chiều dài nằm trên các mặt phẳng ngang khác nhau).
Khoảng thời gian kết hợp với mỗi khung phân tích phim được tính toán để giải thích nguyên nhân sự khác nhau của khung hình này đối với khung hình kia về tốc độ của máy quay. Điều này là quan trọng đối với việc tạo ra một thời gian không bị méo và đối với phép vi phân số học chính xác để đưa ra giá trị vận tốc.
Phương trình dùng để làm phẳng vị trí là một cửa sổ hình tam giác thường được sử dụng trong phép phân tích chuyển động. Việc sử dụng 4 hành trình biểu thị một sự hài hoà giữa sự giảm độ ồn và các lần chỉnh đặt đầu tiên và cuối cùng (tức là sự sai lệch quỹ đạo).
...
...
...
Mọi chi tiết xin liên hệ: ĐT: (028) 3930 3279 DĐ: 0906 22 99 66
D.3.3.1. Điểm chạm nhau của xe đối diện (xem 5.3.4)
Điểm chạm nhau của xe đối diện được đo như là độ dịch chuyển ngang tính từ đường tâm xe đối diện, tại khung phim ngay trước sự chạm nhau đầu tiên giữa môtô/xe đối diện, đối với các va chạm vào phía trước, góc trước, phía sau hoặc góc sau xe đối diện. Đối với các va chạm vào bên cạnh xe đối diện, điểm chạm nhau của xe đối diện được đo như là độ dịch chuyển dọc tính từ gờ trước xe đối diện tại khung phim ngay trước sự chạm nhau đầu tiên giữa môtô/xe đối diện.
D.3.3.2. Kiểm tra vị trí người nộm (xem 5.3.5)
Các vị trí của các điểm tham chiếu khác nhau của người nộm liên quan đến các mục tiêu mô tô được đo bằng phương pháp chụp ảnh tại thời điểm thiết lập trước thử nghiệm (thời điểm tại đó phải thoả mãn các tiêu chuẩn về sự định vị đã nêu theo ISO 13232-6 và trong khoảng 0,100 s trước đụng chạm đầu tiên giữa môtô/xe đối diện (nhằm xác định rằng người nộm không dịch chuyển khỏi vị trí chuẩn của nó).
D.4. Phụ lục A (quy định) Số hoá điểm tâm của mũ bảo hiểm
Điểm tâm của mũ bảo hiểm được sử dụng như một điểm gần đúng với tâm của đầu; và để loại trừ các tác động không liên quan của chuyển động quay góc của đầu sẽ xuất hiện khi sử dụng các mục tiêu của mũ bảo hiểm. Điểm tâm của mũ bảo hiểm này được định nghĩa là tâm của đường tròn ngoại tiếp mũ bảo hiểm tại lúc chạm nhau đầu tiên của môtô/xe đối diện. Sau đó, đường tròn này được định tâm gần đúng đối với hoặc trong mũ bảo hiểm để xác định điểm tâm.
D.5. Phụ lục B (quy định) Yêu cầu đối với trường nhìn máy chụp ảnh tốc độ cao
Xem D.2.6.2.
D.6. Phụ lục C (quy định) Mã máy tính dùng cho phép tính toán các gia tốc dài và gia tốc góc của phần đầu
...
...
...
Mọi chi tiết xin liên hệ: ĐT: (028) 3930 3279 DĐ: 0906 22 99 66
MỤC LỤC
Lời nói đầu
Lời giới thiệu
1. Phạm vi áp dụng
2. Tài liệu viện dẫn
3. Định nghĩa, ký hiệu và chữ viết tắt
4 . Yêu cầu
4.1. Biến số được ghi bằng dụng cụ điện tử
...
...
...
Mọi chi tiết xin liên hệ: ĐT: (028) 3930 3279 DĐ: 0906 22 99 66
4.3. Mục tiêu ảnh cần được số hóa
4.4. Đặc điểm kỹ thuật của cảm biến
4.5. Hệ thống thu dữ liệu trong và đặc điểm kỹ thuật của hệ thống ghi
4.6. Chụp ảnh tốc độ cao
4.7. Chụp ảnh tĩnh
5. Phương pháp đo
5.1. Phép đo trước thử nghiệm liên quan đến rút gọn dữ liệu
5.2. Rút gọn dữ liệu
5.3. Điều kiện của va chạm
...
...
...
Mọi chi tiết xin liên hệ: ĐT: (028) 3930 3279 DĐ: 0906 22 99 66
6. Tài liệu
Phụ lục A (quy định) Số hoá điểm tâm của mũ bảo hiểm
Phụ lục B (quy định) Yêu cầu về trường nhìn của việc chụp ảnh tốc độ cao
Phụ lục C (quy định) Mã chương trình máy tính dùng cho tính toán gia tốc dài và gia tốc góc của phần đầu
Phụ lục D (tham khảo) Cơ sở lôgíc của TCVN 7973 -4
1) Một bản danh sách mô tả một hoặc nhiều sản phẩm mẫu thoả mãn yêu cầu này đã được xác nhận bởi Ban thư ký ISO và Ban thư ký của ISO/TC 22/SC 22. Bản danh sách được xác nhận với mục đích tạo thuận lợi cho người sử dụng TCVN 7973 (ISO 13232) và không có sự chứng nhận bởi ISO đối với những sản phẩm được liệt kê. Có thể sử dụng các sản phẩm khác nếu có thể chỉ ra chúng cho các kết quả như nhau.
2) Gia tốc kế model 7264 : 2000 là một sản phẩm được cung cấp bởi tập đoàn Endevco Corp., San Juan Capistrano, California, Mỹ. Thông tin này được đưa ra với mục đích tạo sự thuận tiện cho người sử dụng TCVN 7973 (ISO 13232) và không có sự chứng nhận bởi ISO đối với sản phẩm này. Có thể sử dụng các sản phẩm khác nếu có thể chỉ ra chúng cho các kết quả như nhau.
3) Một bản danh sách mô tả một hoặc vài sản phẩm mẫu thoả mãn yêu cầu này đã được xác nhận bởi Ban thư ký ISO và Ban thư ký của ISO/TC 22/SC 22. Bản danh sách được xác nhận với mục đích tạo sự thuận tiện cho người sử dụng TCVN 7973 (ISO 13232) và không có sự chứng nhận bởi ISO đối với những sản phẩm được liệt kê. Có thể sử dụng các sản phẩm khác nếu có thể chỉ ra chúng cho các kết quả như nhau.
4) Cảm biến lực model 1716 là một sản phẩm được cung cấp bởi Robert A. Denton, Inc., Rochester Hills, Michigan, Mỹ. Thông tin này được đưa ra với mục đích tạo sự thuận tiện cho người sử dụng tiêu chuẩn TCVN 7973 (ISO 13232) và không có sự chứng nhận bởi ISO đối với sản phẩm này. Có thể sử dụng các sản phẩm khác nếu có thể chỉ ra chúng cho các kết quả như nhau.
...
...
...
Mọi chi tiết xin liên hệ: ĐT: (028) 3930 3279 DĐ: 0906 22 99 66
6) Một bản danh sách mô tả một hoặc nhiều sản phẩm mẫu thoả mãn yêu cầu này đã được xác nhận bởi Ban thư ký ISO và Ban thư ký của ISO/TC 22/SC 22. Bản danh sách được xác nhận với mục đích tạo sự thuận tiện cho người sử dụng TCVN 7973 (ISO 13232) và không có sự chứng nhận bởi ISO đối với những sản phẩm được liệt kê. Có thể sử dụng các sản phẩm khác nếu có thể chỉ ra chúng cho các kết quả như nhau.
7) Cảm biến lực model 1708, 1891 và 2693 là các sản phẩm được cung cấp bởi Robert A. Denton, Inc., Rochester Hills, Michigan, Mỹ. Thông tin này được đưa ra với mục đích tạo sự thuận tiện cho người sử dụng TCVN 7973 (ISO 13232) và không có sự chứng nhận bởi ISO đối với các sản phẩm này. Có thể sử dụng các sản phẩm khác nếu có thể chỉ ra chúng cho các kết quả như nhau.
8) Một bản danh sách mô tả một hoặc nhiều sản phẩm mẫu thoả mãn yêu cầu này đã được xác nhận bởi Ban thư ký ISO và Ban thư ký của ISO/TC 22/SC 22. Bản danh sách được xác nhận với mục đích tạo sự thuận tiện cho người sử dụng TCVN 7973 (ISO 13232) và không có sự chứng nhận bởi ISO đối với những sản phẩm được liệt kê. Có thể sử dụng các sản phẩm khác nếu có thể chỉ ra chúng cho các kết quả như nhau.
(Không có nội dung)
Vì chưa Đăng Nhập nên Bạn chỉ xem được Thuộc tính của Văn bản. Bạn chưa xem được Hiệu lực của Văn bản, Văn bản Liên quan, Văn bản thay thế, Văn bản gốc, Văn bản tiếng Anh,...
Nếu chưa có Tài khoản, mời Bạn Đăng ký Tài khoản tại đây
(Không có nội dung)
Vì chưa Đăng Nhập nên Bạn chỉ xem được Thuộc tính của Văn bản. Bạn chưa xem được Hiệu lực của Văn bản, Văn bản Liên quan, Văn bản thay thế, Văn bản gốc, Văn bản tiếng Anh,...
Nếu chưa có Tài khoản, mời Bạn Đăng ký Tài khoản tại đây
Vì chưa Đăng Nhập nên Bạn chỉ xem được Thuộc tính của Văn bản. Bạn chưa xem được Hiệu lực của Văn bản, Văn bản Liên quan, Văn bản thay thế, Văn bản gốc, Văn bản tiếng Anh,...
Nếu chưa có Tài khoản, mời Bạn Đăng ký Tài khoản tại đây
-
Ban hành: {{m.News_Dates_Date}} Hiệu lực: {{m.News_EffectDate_Date}} Tình trạng: {{m.TinhTrang}} Cập nhật: {{m.Email_SendDate_Date}} Ban hành: {{m.News_Dates_Date}}Hiệu lực: {{m.News_EffectDate_Date}}Tình trạng: {{m.TinhTrang}}Cập nhật: {{m.Email_SendDate_Date}}
Vì chưa Đăng Nhập nên Bạn chỉ xem được Thuộc tính của Văn bản. Bạn chưa xem được Hiệu lực của Văn bản, Văn bản Liên quan, Văn bản thay thế, Văn bản gốc, Văn bản tiếng Anh,...
Nếu chưa có Tài khoản, mời Bạn Đăng ký Tài khoản tại đây
-
Ban hành: {{m.News_Dates_Date}} Hiệu lực: {{m.News_EffectDate_Date}} Tình trạng: {{m.TinhTrang}} Cập nhật: {{m.Email_SendDate_Date}} Ban hành: {{m.News_Dates_Date}}Hiệu lực: {{m.News_EffectDate_Date}}Tình trạng: {{m.TinhTrang}}Cập nhật: {{m.Email_SendDate_Date}}
Vì chưa Đăng Nhập nên Bạn chỉ xem được Thuộc tính của Văn bản. Bạn chưa xem được Hiệu lực của Văn bản, Văn bản Liên quan, Văn bản thay thế, Văn bản gốc, Văn bản tiếng Anh,...
Nếu chưa có Tài khoản, mời Bạn Đăng ký Tài khoản tại đây
Vì chưa Đăng Nhập nên Bạn chỉ xem được Thuộc tính của Văn bản. Bạn chưa xem được Hiệu lực của Văn bản, Văn bản Liên quan, Văn bản thay thế, Văn bản gốc, Văn bản tiếng Anh,...
Nếu chưa có Tài khoản, mời Bạn Đăng ký Tài khoản tại đây